電力驅動系統逆變器實時仿真

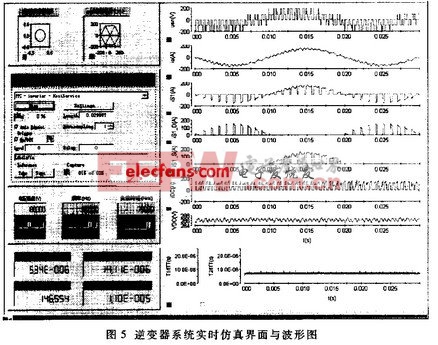
圖5是相電壓uan、相電流ia、a相上半橋開關電流is1、S1開關管電流is1_s、S1續流二極管電流is1_D、直流環路電壓VDC、直流環路電流iDC、任務總執行時間T1/tTT和T2/tTT的實時仿真波形。圖中還顯示出逆變器的輸出電壓空間矢量的矢端軌跡為正六邊形,并內含從零電壓矢量至六邊形頂點的連線;而電機的轉子磁鏈空間矢量的矢端軌為圓形。實時仿真系統經長時間連續運行,沒有出現數值不穩定問題。
作為比較,對相同系統參數的逆變器-交流電機系統進行步長為100ns的離線仿真,并采用與實時仿真相同的Simulink模型(無硬件接口)和數值積分方法。結果是更小的步長并沒有對仿真精度有明顯的改進,這表明步長為11μs的實時仿真已經具有較高的仿真精度。
圖5 逆變器系統實時仿真界面與波形圖
本文提出的逆變器模型已分別在交流永磁同步電機、無刷直流電機和異步電機驅動系統的硬件在回路仿真測試中得到成功應用。







評論