電力驅動系統逆變器實時仿真

雙電平三相電壓源型逆變器由6個開關管和6個與開關管反向并接的續流二極管組成,見圖1。采用實際控制器輸出的6個PWM開關邏輯信號a+,b+,c+;a-,b-,c-定義逆變器a,b,c三相正半橋開關函數:
Sfap=1·×a+,SFbp=1×b+,SFcp=1×c+
和負半橋開關函數:
SFan=1×a-,SFbn=1×b-,SFcn=1×c-。
則全橋開關函數為:
SFa=Sfap-SFan,SFb=SFbp-SFbn,SFc=SFcp-SFcn。
逆變器輸出端a,b,c與直流電流中點o之間的電壓為:uao=0.5VDC×Sfab,ubo=0.5VDC×SFb,uco=0.5VDC×SFc,
其中,VDC為直流環路電壓。由此得到線電壓為:
uab=uao-ubo,ubc=ubo-uco,uca=uco-uao
相電壓為:
uan=uao-uno,ubn=ubo-uno,ucn=uco-uno。
式中,uno=(1/3)(uao+ubo+uco)為電機三相繞組中點n與直流電流中點o之間的電壓。
正半橋a,b,c相開關器件電流為:
is1=ia×Sfap,is3=ib×SFbp,is5=ic×SFcp
負半橋a,b,c相開關器件電流為:
is4=ia×SFan,is6=ib×SFbn,is2=ic×SFcn
三相電流為:
ia=is1+is4,ib=is3+is6,ic=is5+is2
另外開關電流為:
is1=is1_s-is1_D,iS4=is4_D-is4_s
直流電流為:
iDC=is1+is3+is5
其中,is1_s,is1_D,is4_s,is4_D分別為a相正、負半橋開關管和續流二極管電流。據此,可建立逆變器的Simulink框圖模型。圖2(a)~(d)分別是逆變器模型頂層和底層的Simulink框圖。
著名的機電控制系統開發平臺較是基于MATLAB/Simulink/Real-Time Workshop[4~5]開發的dSPACE實時系統。本文的相關課題選用單板dSPACE系統DS1103。
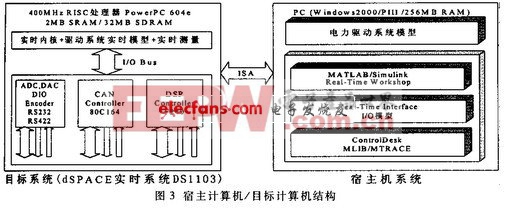
圖3 宿主計算機/目標計算機結構
DS1103采用32位精簡指令集處理器PowerPC 604e進行浮點運算。精簡指令集處理器采用小指令集、多寄存器結構,指令執行簡單快速;統一用單周期指令,克服了復雜指令集處理器周期指令有長有短,造成運行中偶發不確定性,致使運行失常的弊端。
DS1103板插入PC機主板的ISA擴展槽中,由PC機提供電源,所有的實時計算都是由DS1103獨立執行,而dSAPCE的試驗工具軟件則并行運行于PC主機上。宿主計算機/目標計算機結構如圖3所示。
Real-Time Interface(RTI)是dSPACE系統的實時實現軟件,它對實時代碼生成軟件Real-Time Workshop進行擴展,集成了dSPACE系統I/O硬件實時模型,可實現從Simulink模型到dSPACE系統實時C代碼的自動生成同,生成的實時代碼包括實時內核和應用代碼[6]。RTI還根據信號和參數產生一個變量文件,可以用dSPACE的試驗工具軟件ControlDesk進行訪問[7]。
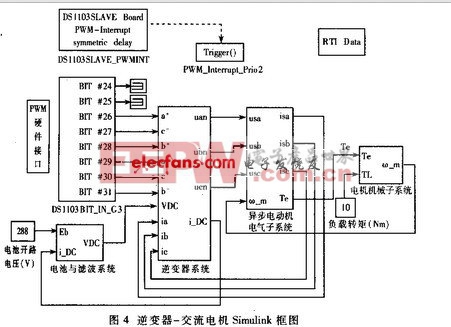
在功能強大的實時代碼實現軟件RTI與界面友好的試驗軟件ControlDesk支持下,可以很快地實現電力驅動系統快速控制原型與硬件在回路仿真測試。圖4是采上述的逆變器模型與dSPACE系統I/O硬件模型組建的逆變器-交流電機系統Simulink框圖。圖中下部是逆變器-異步電機系統模型,作為實時任務T1,模型具有實際控制器的硬件接口,可輸入6路實際的PWM開關信號,輸出電流、電壓等模擬信號;上部是PWM控制器模型,作為實時任務T2,模型由DSP控制器F240硬件產生實時PWM信號。T1與T2以異步采樣模式工作,構成兩定時器任務系統。為減少采樣控制器輸出引發的可變延時造成抖動的影響,設置T1的采樣速率遠高于T2的采樣速率。
3 實時仿真結果
系統仿真是針對某電動汽車電力驅動系統的,其中逆變器參數為:PWM開關頻率fPWM=1kHz,開關死區時間=7μs;直流電源與濾波參數為:電池開路電壓Ebo=288V,電源內阻Rb=0.03Ω,濾波電容C=10000μF;異步電機參數為:132V,182A,50Hz,45kW,2900rpm;負載轉矩=50Nm;交流電源參數為:相電壓幅值=100V,頻率=50Hz。實時仿真采用Euler數值積分方法(ODE1),T1采樣周期=11μs,T2采樣周期=PWM周期=1ms。







評論