電源轉換器實現高性能電源管理

控制方法
圖1所示為電感電流連續流動的連續傳導工作模式。輸出電壓經分壓器R1與R2分壓后由反饋引腳FB讀取,并通過低增益跨導(gm)放大器在誤差比較器上與0.8V參考電壓VREF進行比較。如果反饋電壓下降且gm放大器輸出低于0.8V,則誤差比較器將觸發控制邏輯,生成一個導通時間周期。導通時間周期長度將由固定tON估計電路預先確定:
其中,VOUT為輸出電壓,VIN為功率級輸入電壓,fSW為開關頻率。
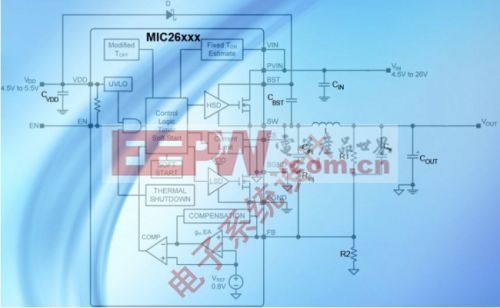
圖1:MIC26XXX系列內部模塊圖。
在導通時間周期完成后,內部高壓側驅動器將關斷高壓側MOSFET,而低壓側驅動器將導通低壓側MOSFET。在大多數情形下,關斷時間周期長度取決于反饋電壓。當反饋電壓降低且gm放大器輸出低于0.8V時,將觸發導通時間周期,此時關斷時間周期結束。如果反饋電壓決定的關斷時間周期小于最小關斷時間tOFF(min),則控制邏輯將用tOFF(min)來取代。tOFF(min)是在升壓電容(CBST)中維持足夠的能量來驅動高壓側MOSFET時所必需的時間。從tOFF(min)獲得的最大占空比為:
 ,其中tS=fSW。
,其中tS=fSW。
在穩態工作時,最好不要使器件的關斷時間接近tOFF(min)。另外,在像24V到1.0V的高VIN到VOUT應用中,最小tON會導致較低的開關頻率。在負載瞬變過程之中,由于關斷時間變化,開關頻率也將改變。
為更好地解釋控制環路工作情況,現在將穩態與負載的瞬態情況都討論一下。為了便于分析,假設gm放大器增益為1,這樣,誤差比較器的反向輸入與反饋電壓相同。
圖2為穩態工作時的控制環路時序。穩態時,gm放大器通過檢測反饋電壓紋波(此紋波與輸出電壓紋波及電感電流紋波成比例),來觸發導通時間周期。導通時間由tON估計電路預定,關斷時間終止由反饋電壓控制。在反饋電壓紋波的底部(VFB下降到低于VREF時產生),關斷周期結束,控制邏輯電路觸發下一個導通周期。
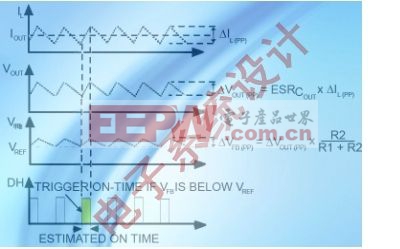
圖2:穩態響應。
圖3a與3b顯示了傳統PWM控制拓撲與麥瑞半導體Hyper Speed控制拓撲的負載瞬變工作情況。在標準的PWM控制方法中,負載瞬變時,占空比將增加,并且在維持開關頻率相對不變的同時,輸出需要一個完整的開關周期來響應。使用Hyper Speed控制拓撲,開關頻率將在負載瞬變過程中改變,而一旦輸出穩定在新的負載電流水平,則將恢復標稱固定頻率。由于占空比和開關頻率發生變化,因此輸出恢復時間很快,并且輸出電壓偏差小到可以忽略不計。









評論