基于INtime的雷達實時操控顯示終端設計

2 系統總體結構
雷達實時操控顯示終端是一個集實時通信、控制、數據處理及顯示的綜合多任務系統,既有實時性要求很高的雷達設備控制、跟蹤數據采集和跟蹤數據處理等任務,又有實時性要求較低的數據管理,狀態控制,雷達目標、數字原始視頻、電子地圖顯示等任務,所以在系統結
構設計時,把實時和非實時任務分開運行。實時任務運行在INtime內核中,主要完成對跟蹤雷達分系統、光電跟蹤分系統的跟蹤數據實時采集和處理。根據處理結果實時控制跟蹤伺服分系統,并將跟蹤天線對準目標,以達到跟蹤功能,同時完成與非實時進程的數據同步。非實時任務運行在Windows內核中,主要完成雷達分系統非實時的狀態控制和數據顯示,同時完成系統數據的存儲等管理,其系統結構如圖2所示。本文引用地址:http://www.104case.com/article/178201.htm
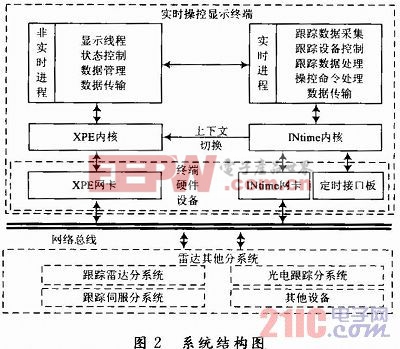
雷達操控顯示終端在硬件選型上,選用加固一體計算機,為更好地發揮計算機的圖形處理能力,計算機顯卡具備2D/3D硬件加速能力。 CPU選用Intel酷睿雙核,并將INtime配置成獨占模式,即INtime獨自占用一個CPU核運行實時進程,Windows占用另一核,這樣可提高系統的穩控性和實時性。終端計算機內置一塊定時接口板,用于產生雷達系統同步時鐘,板卡通過PCI總線向終端計算機提供時鐘中斷信號。終端與雷達其他分系統之間的通信通過網絡傳輸。
為保證系統的健壯穩定,Windows操作系統采用裁剪的嵌入式XPE操作系統,該系統設計成基于休眠方式啟動、內存保護方式運行模式,既保證了系統的快速啟動,又保證了系統的穩定可靠。關于XPE操作系統的設計已有較多文獻資料參考,本文將不做詳細介紹。
3 終端軟件設計
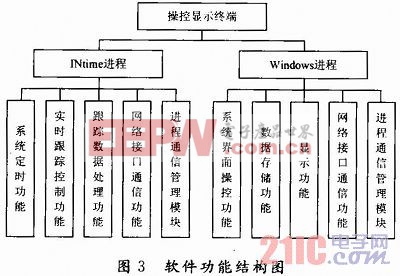
終端軟件采用VC++開發,基于上述系統結構,軟件主要包括INtime的實時進程和Windows的非實時進程,各進程根據任務需求劃分相應的任務和功能模塊,軟件功能結構圖如圖3所示。





評論