太陽能最大功率點跟蹤控制系統(tǒng)的研究與實現(xiàn)

2 系統(tǒng)結(jié)構(gòu)
根據(jù)系統(tǒng)的性能要求,該系統(tǒng)主要由太陽能電池陣列、DC-DC變換器、數(shù)據(jù)采集電路、CPU主控模塊、驅(qū)動電路、計算機控制軟件、MAX232通信、顯示模塊、外圍實驗裝置等部分組成。圖2為該系統(tǒng)框圖。本文引用地址:http://www.104case.com/article/177947.htm

3 系統(tǒng)硬件設(shè)計
3.1 DC-DC轉(zhuǎn)換電路
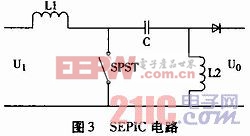
本系統(tǒng)經(jīng)過太陽能光伏板收集到太陽能,然后經(jīng)過DC-DC變換器給蓄電池充電,使輸入輸出阻抗實現(xiàn)匹配;目前,常見的DC-DC變換電路有Buck電路、Boost電路和SEPIC電路,本系統(tǒng)采用SEPIC電路作為DC-DC轉(zhuǎn)換電路。如圖3所示,其輸入電壓和輸出電壓的比值可以為任意值,如下式:
![]()
其中,β為開關(guān)SPST的占空比;由式(9)可知,我們可以通過調(diào)節(jié)β決定U0和U1的大小,從而實現(xiàn)最大功率點的跟蹤。
3.2 CPU主控模塊
系統(tǒng)采用STM32F103c8作為主控芯片。STM32F103c8使用高性能的ARM Cortex-M3 32位的RISC內(nèi)核,工作頻率為72 MHz,內(nèi)置高速存儲器(高達128K字節(jié)的閃存和20K字節(jié)的SRAM),豐富的增強I/O端口和聯(lián)接到兩條APB總線的外設(shè)。所有型號的器件都包含2個12位的ADC、3個通用16位定時器和一個PWM定時器,還包含標準和先進的通信接口:多達2個I2C和SPI、3個USART、一個USB和一個CAN。






評論