電源:CVCF逆變器波形控制技術研究

新增一個配置極點在z域的0.1,此時系統的突加負載仿真波形如圖5(b)所示,我們可以看見原有的靜態誤差已經被消除。
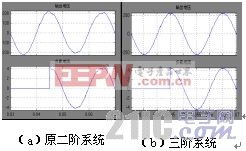
圖5 突加負載仿真對比
4 復合控制
綜合以上兩種控制方案構成整個控制系統,其中,狀態反饋極點配置控制居于控制系統內層,其目的是通過重新配置極點來改善系統的動態響應特性。重復控制居于控制系統外層,其主要目的是減小非線性負載等因素造成的諧波失真。只要極點配置和重復控制單獨作用時系統穩定,那么復合系統就是穩定的。
5實驗結果
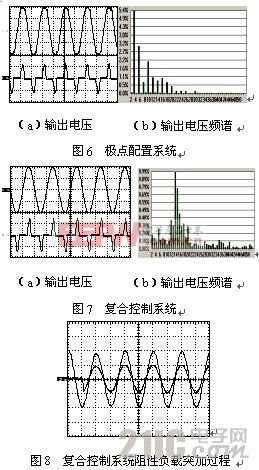
圖6是極點配置系統帶整流型非線性負載的波形,THD值為6.89%。圖7是加上外層的重復控制后的非線性負載工作波形,負載電流峰值15A, THD值降為1.42%,分析電壓頻譜發現13次以下的諧波幅值有明顯的衰減,這驗證了重復控制的諧波抑制能力主要體現在中低頻段。圖8是復合系統突加5A的阻性負載電壓波形,系統很快結束過渡過程,同時也基本消除了靜態誤差。
6 結論
本文分析了重復控制和極點配置兩種控制方式在數字化CVCF逆變器中的應用,提出了一種基于重復控制和極點配置的復合控制策略。實驗結果證明該策略使系統得到了比較理想的穩態特性和動態特性,而且易于實現,有一定的實用價值。
參考文獻
1 Ying yu Tzou,Rong shyang Ou,Meng yueh Chang. High performance programmable AC power source with low harmonic distortion using DSP based repetitive control technique. IEEE Trans. Power electronics, 1997, 12(4): 715-725.
2 Gene F. Franklin , J.David Powell, Abbas Emami-
Naeini, Feedback control of dynamic systems, Addison-Wesley Publishing Company, Inc., 1991.
3 B.A.Francis,W.M.Wonham,The internal model principle for linear multivariable regulators. Appl. Math. Opt,vol2,no.2:170-194,1975.







評論