電源:CVCF逆變器波形控制技術(shù)研究

1 引言
本文引用地址:http://www.104case.com/article/176499.htm在電力電子裝置中,以CVCF逆變器為核心的UPS得到了廣泛的應(yīng)用,對其輸出波形主要的技術(shù)要求包括低的穩(wěn)態(tài)總諧波畸變率(THD)和快速的動態(tài)響應(yīng),由于非線性負(fù)載、PWM調(diào)制過程中的死區(qū)和逆變器系統(tǒng)本身的弱阻尼性等因素的影響,采用一般的閉環(huán)PWM控制效果不理想。本文以美國TI公司生產(chǎn)的TMS320F240DSP為控制芯片,采用重復(fù)控制[1]改善系統(tǒng)的穩(wěn)態(tài)性能,采用引入積分控制[2]的極點配置[2]改善系統(tǒng)的動態(tài)特性,實驗結(jié)果表明,本方案可以同時實現(xiàn)高品質(zhì)的穩(wěn)態(tài)和動態(tài)特性。
2 重復(fù)控制器設(shè)計
重復(fù)控制的基本思想來源于控制理論中的內(nèi)模原理[3],即如果希望控制系統(tǒng)對某一參考指令實現(xiàn)無靜差跟蹤,那么產(chǎn)生該參考指令的模型必須包含在穩(wěn)定的閉環(huán)控制系統(tǒng)內(nèi)部。圖一是本系統(tǒng)采用的重復(fù)控制框圖,以下對其各部分進(jìn)行分析說明。
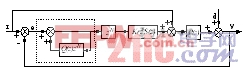
圖1 離散域重復(fù)控制器框圖
P(z)是逆變器的輸入與輸出的離散傳函,是系統(tǒng)中的控制對象。逆變器的開關(guān)頻率比LC濾波器的自然頻率高得多,其動態(tài)特性主要由LC濾波器決定,通過建立系統(tǒng)狀態(tài)方程獲得P(z)。本系統(tǒng)中,L=0.88mH,C=60µF, 電感的等效串聯(lián)電阻為0.4Ω,開關(guān)頻率和采樣頻率都是10KHz,推導(dǎo)出其離散傳函為:
作出其伯德圖如圖2所示,可以看到逆變器存在一個諧振峰,阻尼比很小。
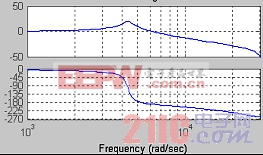
圖2 逆變器P(z)的伯德圖
圖1中虛線框內(nèi)為重復(fù)控制器的內(nèi)模,N為一個周期內(nèi)采樣的次數(shù)。該內(nèi)模實際上是一個周期延遲正反饋環(huán)節(jié),只要輸入信號是以基波周期重復(fù)出現(xiàn),其輸出就是對輸入信號的逐周期累加。當(dāng)Q(z)取值為1,可視為以周期為步長的積分環(huán)節(jié),可以達(dá)到無靜差,但是給系統(tǒng)帶來N個位于單位圓周的極點,使開環(huán)系統(tǒng)呈現(xiàn)臨界振蕩狀態(tài),本系統(tǒng)中Q(z)取為0.95,以改善系統(tǒng)穩(wěn)定性。
圖1中重復(fù)控制器里包含有一個補(bǔ)償器
其中濾波器S(z)由以下兩部分構(gòu)成
陷波濾波器S1(z)主要用于對消逆變器的諧振峰值,二階濾波器S2(z)主要提供高頻衰減。超前環(huán)節(jié)zk 補(bǔ)償濾波器S(z)和控制對象P(z)總的相位滯后,Kr 是重復(fù)控制增益。補(bǔ)償器C(z) 要達(dá)到的目的是使校正后的對象中低頻增益接近于1,而高頻增益則盡快地降至-26dB以下,同時系統(tǒng)在整個中低頻段前向通道的總相移盡量小。取Kr =0.9,zk =z5 ,作出C(z)P(z)的伯德圖,如圖3所示,可以看到設(shè)計符合要求。
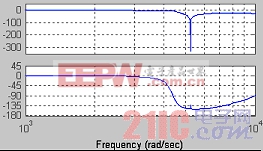
圖3 C(z)P(z)的伯德圖
前向通道上串接的周期延遲環(huán)節(jié)z-N使控制動作延遲一個周期進(jìn)行,即本周期檢測到的誤差信息在下一周期才開始影響控制量。引入周期延遲環(huán)節(jié)的主要原因是系統(tǒng)中含有超前環(huán)節(jié)zk,如果此系統(tǒng)要能夠物理實現(xiàn),必須有一延遲環(huán)節(jié)。
3 極點配置
重復(fù)控制有效的改善逆變器穩(wěn)態(tài)性能,但動態(tài)響應(yīng)欠佳。實際上,逆變器的自然動態(tài)特性之所以不好,最主要的原因是逆變器自身的阻尼太弱。對此,最直接有效的解決辦法就是引入狀態(tài)反饋,進(jìn)行極點配置,增加控制對象的阻尼。
圖4是為單相逆變器的等效電路,逆變器空載時阻尼最小。因此,在實施極點配置時,假定逆變器處于空載(最惡劣的情況),配置極點時應(yīng)注意逆變器帶載以后阻尼比會變大。

圖4 單相PWM逆變器模型
取電容電壓vC和電容電流iC作為狀態(tài)變量,PWM逆變器的空載模型為:
引入狀態(tài)反饋
,其中r 是閉環(huán)系統(tǒng)參考指令,K是反饋增益陣,則閉環(huán)系統(tǒng)的狀態(tài)方程變?yōu)椋?/p>
將閉環(huán)極點配置在z域的0.74±0.3i點,此時系統(tǒng)自振蕩頻率ωn為4454rad/s(大致與LC濾波器截止頻率相同);阻尼比ξ為0.5。圖5(a)是系統(tǒng)的突加負(fù)載仿真波形,觀察發(fā)現(xiàn)輸出電壓在突加瞬間跌落后不能完全回到原來的軌跡,而是有一個固有的靜態(tài)誤差。對反饋系統(tǒng)分析發(fā)現(xiàn),電容電壓vC 反饋相當(dāng)于一個比例環(huán)節(jié)P,電容電流iC 反饋相當(dāng)于一個微分環(huán)節(jié)D,都不能消除靜態(tài)誤差。因此,我們在控制系統(tǒng)中引入積分環(huán)節(jié),把輸出y的積分量和狀態(tài)變量一起作為反饋量,假設(shè)這個新變量為xI,即
,原來的二階系統(tǒng)變?yōu)榱巳A系統(tǒng)








評論