數字化中頻SPWM逆變電源控制系統

可設逆變器的輸出的電壓的上限
,下限值為
。執行如下操作:當
時
,取消積分運算;當
時,
;取消積分運算。即通過限幅防止控制量的飽和,控制量的飽和主要是由于積分項的飽和而引起的。積分飽和會導致被控量出現較大超調和長時間的波動,這對控制系統是不利的。
當在輸出變化較小時,通過計算得到的PWM控制寄存器的值可能也會有小幅度的振動,這樣會使系統不穩定。若設置適當的死區范圍,則可以消除由此引起的振蕩,又不會太大影響輸出精度。
時,u(k)=u(k-1),控制量保持不變;當
,按照PI算法,計算輸出控制量
。其中
為死區的閾值,依據系統的控制精度的要求來確定。設置死區可以減少執行機構的頻繁動作,增強系統運行的穩定性。
3.4 保護控制:
數字化控制的電源系統中,一般設置保護硬件和軟件兩套保護系統,確保出現故障能有效保護。通常是由硬件電路負責故障狀態的快速檢測,再通過軟件或硬件保護及時封鎖開關管的驅動脈沖。逆變器系統中保護及監控部分通常包括過/欠壓,過/欠流等。故障保護的監控過程為:通過采樣及A/D轉換將各種信號的數字量送到DSP,與相應的保護門限值進行比較,若超過門限值則采取保護措施。這樣不僅實現簡單而且還可以監控各類故障,便于維護。由于故障保護是需要實時監控的,而且一旦發生故障應及時采取相應措施控制輸出。因此應在主程序中對各保護狀態量進行實時查詢
4 軟件設計
通過前面的分析我們可以知道,逆變橋的SPWM信號由片內PWM模塊實現,波形的控制和調節都需要在PWM調節周期中完成,屬于定時器管理事件。在進行電壓調節器、電流調節器計算時還需要實時獲得、處理采樣值,這里主要利用片內A/D模塊。另外,在和單片機進行通信時可以利用SCI口實現,各類保護則是需要不斷查詢各個狀態量,根據其具體數值采取相應的動作。系統軟件總的流程框圖如圖2:
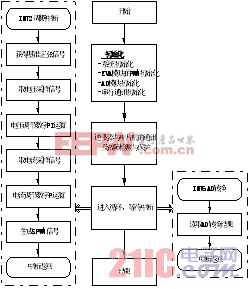
圖2系統軟件的總體結構流程框圖
程序首先對一些寄存器進行設置,并且初始化所有的變量。然后使能所需的中斷,啟動定時器。開始執行后臺一些對實時要求不高的程序,比如通訊等功能。CPU的中斷INT2,INT6按照一定的時間打斷后臺程序的執行,讓CPU執行一些實時要求高的程序,比如正弦波發生程序,電流、電壓采樣。
因為本系統對軟件的實時處理能力要求很高,所以絕大多數功能模塊是在中斷子程序中完成的。而且由于系統的功能模塊繁多,所以各模塊應根據系統的要求嚴格按照先后順序執行,以保證各模塊互不干擾,協調工作。INT2為定時器的中斷子程序,是最重要的一個子程序,在該子程序中主要完成對逆變器的控制,因此其中斷優先級最高。一旦出錯那么整個系統的輸出就會發生畸變。最后是A/D的中斷子程序,在該子程序中讀取輸出電壓和輸出電感電流的轉換結果。
5 實驗結果
本章通過實驗將雙閉環技術對中頻逆變器的控制效果進一步加以驗證,給出了實驗結果具體的實驗參數如下:輸入直流母線電壓270V;輸出電壓115V/400Hz;載波頻率25kHz; 輸出濾波電感3.4mH;輸出濾波電容3u; 輸出功率 。采用的控制芯片為TI公司的TMS320LF2407。圖3、圖4分別是阻性負載和感性負載時輸出電壓及電感電流波形。其中,CH1使用的是1:500的差分探頭。可以看出,輸出電壓波形的正弦性較好。測得阻性負載時總諧波含量為THD=1.124%,感性負載時總諧波含量為THD=1.620%。
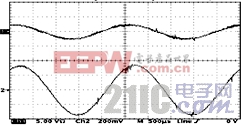
圖3阻性負載時輸出電壓及電感電流波形
(CH1:濾波電感電流波形;CH2:輸出電壓波形)
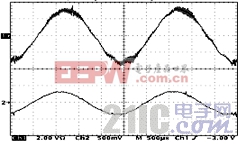
圖4感性負載時輸出電壓及電感電流波形
(CH1:濾波電感電流波形;CH2:輸出電壓波形)
6 結論
本文所介紹的中頻SPWM逆變電源數字化控制系統以DSP作為主控芯片,結構緊湊,可靠性高,而且成本低,調試方便,充分體現出了數字控制的優勢。總之,全數字化的實現大大減少了中頻SPWM逆變電源所需要的元器件,降低了生產成本,提高了集成度,使實現系統智能模塊化成為可能,并增加了系統的可靠性;全數字化還使得系統具有很強的可編程性,這樣使系統更易于更新和升級。
參考文獻
[1] Li Jian, Kang Yong etc, Fuzzy-Tuning PID Control of an Inverter With Rectifier-Type, Nonlinear Loads, in Conf.rec.IEEE-IPEMC.Beijing,2000,pp381-384.
[2]Hua C.Two-level switching pattern deadbeat DSP controlled PWM Inverter. IEEE Trans. Power Electr.1995,10(5):310-317
[3] 陶永華,尹怡欣,葛蘆生,新型PID控制及其應用,機械工業出版社
[4] D.M. Divan., Inverter Topologies and Control Techniques for Sinusoidal Output Power Supply, IEEE APEC’91









評論