基于變系數滑模觀測器的PMSM伺服系統

DSP采樣得到的電流實時波形如圖3,4a所示。本文引用地址:http://www.104case.com/article/175869.htm
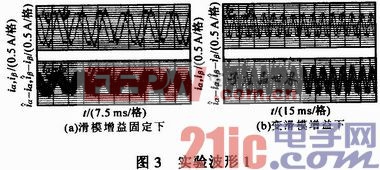
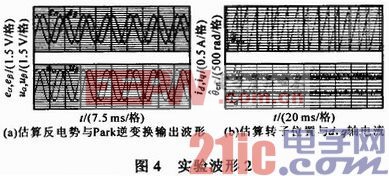
圖3a上半部分是在滑模增益固定不變時,經Clark變換后的電流波形,下半部分是電流誤差開關信號。可見,經Clark變換后的電流雖很小,但估算的電流含有高頻的開關信號,電流存在較大干擾。為進一步消除噪聲干擾,采用滑模增益,根據電流的峰值變化的方法選擇合適的滑模增益,同時適當修改濾波器系數,所得實驗波形如圖3b所示。圖中上半部分是經Clark變換后的電流波形,下半部分則是電流誤差開關信號即對變換后的電流進行估算所得到的波形。可見,估算電流波形所含噪聲大大減少,電流波形互錯90°且波形接近Clark變換后的電流波形。
圖4示出估算反電勢與Park逆變換后輸出波形、估算轉子位置及d,q軸電流波形。
圖4a上半部分為對電流誤差信號進行濾波得到的估算反電勢波形,下半部分則為經過Park逆變換輸出的uαuβ。圖4b上半部分為估算的轉子位置波形,下半部分為得到的id和iq波形。可見,經過合理設計濾波器,得到的轉子位置信號比較光滑,紋波小;而由此得到的id和iq為常量。
5 結論
針對PMSM的無位置傳感器的伺服系統,提出了一種基于變系數滑模觀測器的控制方案,采用協調低通濾波器參數和滑模觀測器系數的方法來抑制滑模觀測器固有的抖動問題。最后,通過實驗驗證了方案的正確性和可行性。整個方案簡單、易于數字化實現,具有廣闊的工程應用前景。













評論