光-氫轉換系統電力電子模塊研究

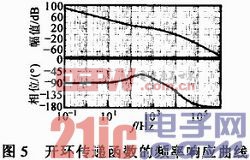
用Matlab可得在PI調節器補償后開環傳遞函數頻率響應曲線,如圖5所示。可見,當Kp=3,Ki=3 000時,交越頻率為10 kHz,為開關頻率的1/5,相位裕量為59.9°,能滿足系統穩態與動態需求。本文引用地址:http://www.104case.com/article/175863.htm
電力電子模塊采用dsPIC33FJ64GS606型數字信號控制器來進行底層電流控制及本地功率管理(光伏功率追蹤)。器件外設為帶有豐富功能的PWM外設,利用邊沿對齊互補的PWM模式,通過各路PWM的非獨立式移相寄存器PHASE來設定各路PWM的相移,生成兩路50 kHz的PWM相位相差180°;用控制器A/D外設,以10 kHz采樣率10位的精度進行兩路電流采樣并反饋回控制回路;將控制器以零階保持的方式進行離散化,可得到用于數字控制器實現的形式。
6 實驗結果與分析
單模塊供電的氫電解系統由于采用多相高頻化,主電路輸出與輸入端僅采用了低容值固態陶瓷電容進行濾波。實驗電解槽額定輸入13 V/30 A,單塊光伏電池板在當前測試光照下的開路電壓為21 V,短路電流為6 A。
圖6a,b示出給定值下系統的穩態運行波形,圖6a為相對相位為180°的雙路PWM和雙路電流波形;圖6b為不同時間尺度下的穩態PWM與雙
路電流波形,實驗波形表明在穩態閉環運行下,可保證PWM相對相位與電流穩態值跟蹤。
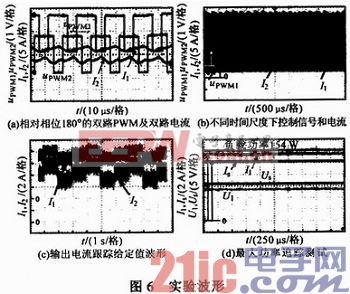
研究中對光伏的最大功率追蹤是通過調節負載電流實現的,為驗證電力電子模塊調節輸出電流的能力,將變化的電流給定值定時賦給兩個電流控制環,圖6c示出兩個通道的輸出電流I1和I2隨給定值變化的實測波形,表明電流控制回路可較好地跟蹤電流給定。圖6d為單模塊帶兩塊光伏板并聯時最大功率追蹤的穩態波形,即電解槽端電壓U1、電流I1、光伏端電壓Us和電流Is波形;通過光照計的校準與降壓變換器的效率測量,可知穩態波形處于電池板的最大功率點處。
7 結論
此處提出了基于分布式供電的制氫系統架構,并對其中關鍵的光伏模塊化供電技術進行深入探討,包括氫電解槽小信號建模,雙相降壓變換器建模,底層數字控制系統設計,以及光伏最大功率追蹤的實現。實驗結果表明,單電力電子模塊的性能達到了預期效果。未來工作將專注于使用多智能體技術協調各電力電子模塊工作。


評論