電壓型PWM整流器電感下限值設計與分析

根據式(3)可得到在該PWM周期內,電流的變化率為:Lre△i/Tcs=EmωTcs/2+(Udc/3)(T1-T2)/Tcs。
根據式(3)中的第1,3式,同時假設相鄰兩個PWM周期內電流的變化相等,可得電流脈動量為:
根據式(4),若忽略零矢量的作用時間,則:T1≥Tcs/2。同時如果選取允許的最大電流脈動量△imax=0.2Im,則可得:
可見,電感選取與額定功率的大小、輸入電壓幅值、輸出直流電壓值、電源角頻率以及功率管開關頻率都有關系。
4 仿真驗證
系統仿真中采用參數如下:電壓環采樣頻率1 kHz;電流環采樣頻率5 kHz;三相輸入電壓幅值310 V;電感寄生電阻阻值0.5 Ω;直流母線電壓給定600 V;三相輸入電源頻率50 Hz;輸出功率7.2 kW;直流母線端電容5 000μF;不考慮死區和開關損耗的影響,根據式(7)計算出:6.76 mH≤Lre≤11.31 mH。為驗證式(6)所計算的電感參數的正確性,Lre分別選取6 mH,10 mH,12 mH進行仿真,圖3分別示出Lre選取6 mH,10 mH和12 mH時的仿真波形。本文引用地址:http://www.104case.com/article/175812.htm
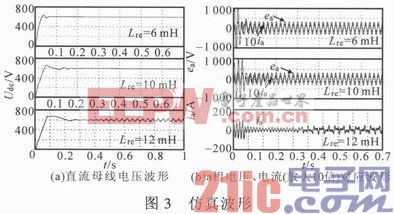
可見,隨著網側電感值增加,系統響應速度變慢,但輸入電流脈動減小。當Lre=12 mH時,系統運行不正常。當Lre=6 mH時,系統可運行,且響應速度快,但電流脈動量超過容許范圍。當Lre=10 mH時,系統能正常運行,但響應速度較慢。
5 實驗驗證
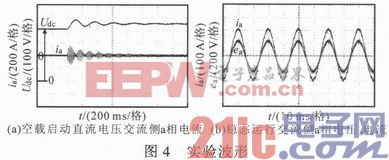
實驗平臺為75 kW中頻電源;系統功率75 kW;直流電壓450 V;網側輸入交流電壓幅值228 V;電網頻率50 Hz;電流環控制頻率5 kHz;計算得:0.143 3mH≤Lre≤0.607 mH。取Lre=0.5 mH,實驗波形如圖4所示,可見,根據所提出的電抗器設計方法,設計的電抗器可滿足系統穩態和動態性能。同時由圖4b可知,在穩態情況下,電網側電流能夠跟蹤電壓波形,實現系統單位功率因數運行。

pwm相關文章:pwm是什么
pwm相關文章:pwm原理
電抗器相關文章:電抗器原理 脈寬調制相關文章:脈寬調制原理 矢量控制相關文章:矢量控制原理

評論