基于STM32的晶閘管三相調壓電路的設計

討論一下ωt∈[0,π]期間即U相正半周的情況,通過圖6我們可以看出,以U_Sync過零點為基準,在經過延遲角Delay Angle(即觸發角α)后開始同時發出了U_Trigger、W_Trigger兩個觸發脈沖,從而相當于將S1、S2、S5、S6開關閉合。由于此時已經過了U、W的自然換相點(圖1的點1),U點電壓大于W點電壓,電流可以從U點(也就是K4)經R15、R3、S1、S2、R14、L1、L3、R18、S6、S5、R11、R19流至W點(也就是K2)。這樣K4點電壓比G4高,G1點電壓比K1高,K5點電壓比G5高,G2點電壓比K2高,根據晶閘管特性我們知道,只要G點電壓高于K點電壓,且電流方向與晶閘管方向一致,則該只晶閘管將被觸發導通,即VT1、VT2導通,與我們的設計思想一致。
再分析一下ωt∈[π,2π]期間即U相負半周的情況,第一組觸發脈沖發生后,經過π時間(180°),根據三相電源原理也將會進行一次換流(圖1的點4),所以必須發生U_Trigger、W_Trigger兩個觸發脈沖,相當于將S1、S2、S5、S6開關閉合。由于此時已經過了W、U的自然換相點,W點電壓大干U點電壓,電流可以從W點(也就是K2)經R19、R11、S5、S6、R18、L1、R14、S2、S1、R3、R15流至U點(也就是K4)。這樣K2點電壓比G2高,G5點電壓比K5高,K1點電壓比G1高,G4點電壓比K4高,根據晶閘管特性我們知道,只要G點電壓高于K點電壓,且電流方向與晶閘管方向一致,則該只晶閘管將被觸發導通,即VT4、VT5導通,也同樣與我們的設計思想一致。其它換流時刻依此原理,不再贅述。
通過以上分析,如果我們正確發生了圖6的三組觸發信號,配合圖3~圖5的電路,通過調整觸發角α的大小就可以有效控制三相電機的輸入電壓,達到調壓的目的。
前面我們分析了觸發脈沖發生的時序及相互依賴關系,下面我們再討論一下脈沖寬度對調壓控制的影響。
對于標準的純阻性負載來說,只要在自然換流點以后的某個時間點觸發,就會使得相應的晶閘管導通。如果在自然換流點之前觸發,而且觸發脈沖的下降沿也處于自然換流點之前,那么將會發生遺漏觸發的現象。所以在純阻性負載情形下,如果觸發脈沖寬度跨越自然換流點,那么換流后對應的晶閘管馬上導通,相當于輸出滿壓。如果調壓控制的話,必須保證觸發脈沖上升沿在自然換流點之后。
對于電機等感性負載來說,相對于純阻性負載會延遲一個功率角φ,調壓時的觸發角應該滿足如下公式α>=max(φ,y),當然可以盡量增大觸發脈沖的寬度W,保證30°W60°比較合適。
3 系統軟件設計
系統主芯片采用意法半導體公司生產的STM32 ARMCortex—M3,開發平臺選用Keil MDK。整個軟件采用了模塊化編程思想,分成數據采集模塊、觸發信號發生模塊、PID控制模塊、通訊模塊及人機交互模塊組成。系統軟件結構圖如圖8所示。本文引用地址:http://www.104case.com/article/175748.htm

其中,數據采集模塊負責采集通過互感器及信號調理電路輸出的相間電壓值(SCR調壓值),供PID控制模塊做PV值使用;觸發信號發生模塊主要用來發生以一定的控制角導通對應晶閘管起到調壓作用的觸發波形;PID控制模塊完成控制到某給定電壓(SV值)的任務;通訊模塊負責完成將調壓后電壓及控制角參數以9 600波特率輸出至計算機的作用;系統人機交互模塊完成通過鍵盤、LCD顯示板進行手動測試的作用。控制軟件的流程圖如圖9所示。
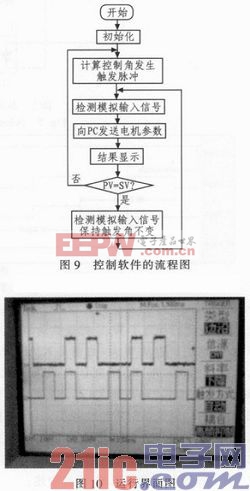
4 實驗應用
本系統應用于油田抽油機的節電項目中,只要按照要求正確將設備與三相電源、三相交流異步電機相連,系統就會自動跟蹤負載。負載輕,所調的電壓就低;負載重,所調的電壓就高。由于晶閘管特性的限制,所調電壓不會低于200 V交流,不然由于導通角較大,低次諧波過多,會出現斷流電機堵轉現象。如圖10所示系統按照需求發生了正確的觸發信號波形,通過實際運行來看,系統運行達到預期結果、穩定可靠。
5 結論
本系統采用STM32高性能ARM處理器設計了光電隔離的晶閘管觸發控制脈沖信號及驅動電路,可以輸出30°~60°脈寬較寬的觸發信號,規避了脈沖變壓器驅動方式只能采用窄脈沖或窄脈沖序列的缺點。軟件采用模塊化思想進行設計,提高了系統軟件的健壯性,同時也提高了系統的可靠性及可維護性。通過實際運行結果表明,系統具有調壓準確、穩定可靠等特點,達到了設計要求。

pid控制相關文章:pid控制原理
可控硅相關文章:可控硅工作原理
電流傳感器相關文章:電流傳感器原理 脈沖點火器相關文章:脈沖點火器原理 三相異步電動機相關文章:三相異步電動機原理










評論