一種集成CAN總線的步進電機驅動裝置

3 軟件設計
本集成CAN總線的步進電機驅動裝置的軟件采用C語言進行開發,應用程序包括初始化模塊、模數轉換模塊、PWM驅動脈沖模塊、電機相電流測量模塊、CAN總線通訊模塊。主程序流程圖如圖5所示。本文引用地址:http://www.104case.com/article/175723.htm
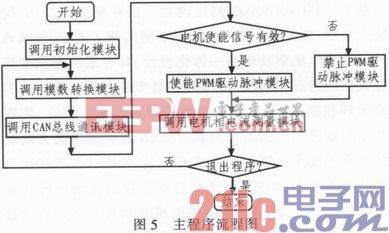
數字信號控制器dsPIC30F60IOA上電復位后首先調用初始化模塊,完成控制器通用I/O口的設置、內部高速模數轉換器、電機專用PWM控制器和CAN總線控制器的初始化任務,然后進入主循環程序。在主循環程序中第一步先調用模數轉換模塊,讀入圖1中SPD電壓信號并轉換成步進電機的轉速數據;第二步調用CAN總線通訊模塊。接收上位節點的控制命令,并產生應答信號;第三步先檢查電機使能信號CMD,如果該信號為有效則使能PWM驅動脈沖模塊以產生步進電機驅動脈沖信號PWM1H/PWM1L~PWM4H/PWM4L,否則就禁止PWM驅動脈沖模塊;第四步調用電機相電流測量模塊,dsPIC30F6010A內部的高速模數轉換器讀入圖1中IMOTOR1和IMOTOR2電壓信號并轉換成步進電機相電流數據,從而實現對電機相電流的精確閉環控制。
4 系統實現
本文提出的集成CAN總線的步進電機驅動裝置采用模塊化設計方案,分別設計了dsPIC30F6010A主控通訊電路板和PWM驅動放大電路板。該裝置的最高驅動電壓為80 V,適用于多種類型的步進電機和控制軟件算法,PWM驅動脈沖的工作頻率設計為40 kHz,以實現盡可能短的反應時間。集成的CAN總線接口實現了2.0B標準CAN協議報文的收發功能,完成了與上位計算機的通訊任務。實現的集成CAN總線的步進電機驅動裝置及其通訊波形如圖6所示,圖6(a)和圖6(b)分別是實驗電路板及CAN總線通訊波形。
5 結論
基于dsPIC30F6010A高性能數字信號控制器,本文提出的集成CAN總線的步進電機驅動裝置實現了CAN總線通訊電路和步進電機驅動電路一體化設計,具有系統集成度高和編程靈活的特點,不僅可對多種類型步進電機的相電流實現精確閉環控制,而且以嵌入式微控制器技術為核心,實現了從獨立的步進電機驅動器到具有CAN總線通訊能力的智能控制單元的技術升級。嵌入式CAN總線接口技術和步進電機驅動技術是當前汽車電子和自動化控制領域里的共性技術,具有CAN總線接口的步進電機驅動裝置可以直接接入分布式CAN總線網絡,驅動裝置成為了CAN總線中的智能節點,可實時接收上位節點的控制指令,對步進電機的運行參數和運行狀態實施遠程網絡控制。










評論