解決SMPS應用中電流模式控制的設計問題

早期開關電源(SMPS)設計采用的標準控制方法稱為“電壓模式”操作。斜坡發生器驅動電壓比較器的一個輸入端,來自誤差放大器/環路濾波器的誤差信號驅動另一個輸入端,見圖1。得到的是僅基于電壓誤差信號的PWM脈沖。該工作模式下的電路具有以下兩個局限性:一是沒有保護電路元件的限流功能,二是對輸入輸出的瞬態變化響應緩慢。
本文引用地址:http://www.104case.com/article/175279.htm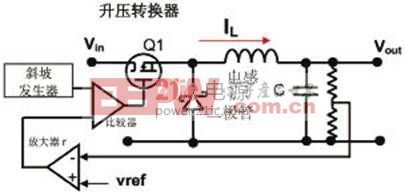
圖1 電壓模式控制
電流模式控制
隨著SMPS設計的成熟,一種稱為“電流模式”控制的更安全的系統正逐步進入設計師的視線。該系統使用由電感電流驅動的電流反饋信號取代了斜坡發生器。用這種方法得到的系統的電感峰值電流由誤差信號直接控制,從而根除了可能由過電流條件導致的電路故障,見圖2。由于電流模式控制的是電感電流,因而可有效地消除控制回路中由電感產生的“極點”和延遲,從而提高系統的瞬態響應速度。
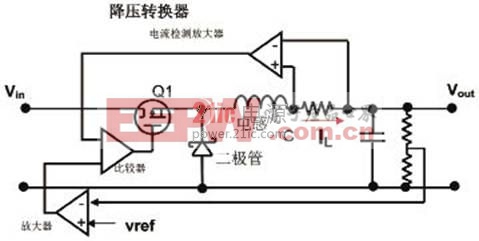
圖2 電流模式控制
斜坡補償的重要性
大多數模擬電流模式PWM控制器的一個顯著問題是其只能測量峰值電流。因輸出電容是對平均電流進行積分以產生所需輸出電壓,因此實際上需要的是測量平均電流的能力。通常,平均電流可以近似為峰值電流的一半。對于占空比小于50%的情況,在啟動下一個PWM周期前,電感電流有足夠的時間衰減到0。只要電感電流在PWM周期末達到0,平均電流就等于電感峰值電流的一半,見圖3。
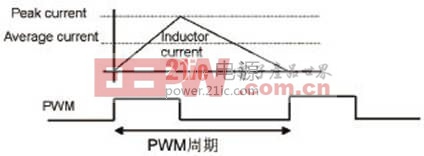
圖3 占空比小于50%時,平均電流近似為峰值電流的一半
通常這種設計方案是可行的,但是當占空比大于50%時,有些問題就會顯現出來。主要原因是平均電流不再近似為峰值電流的一半,見圖4。

圖4 占空比大于50%時,平均電流大于峰值電流的一半
隨著PWM占空比在大于等于50%的條件下繼續增加,平均電流就會越來越大于用測量峰值電流估計的值。得到的輸出電壓將會高于預期,并且持續上升直到較慢的電壓控制回路重新調整電流設定點。輸出電壓會下降到預期電壓以下,然后重復此過程(稱為子周期(sub-cycle)振蕩)。
為解決電流模式的不穩定性問題,針對模擬電流模式控制器開發了名為“斜坡補償”的技術。通過在電壓誤差放大器生成的電流閾值上添加一個下降沿鋸齒波電壓,見圖5,為限流比較器生成新的電流閾值,使其能更緊密地跟蹤平均電感電流。

圖5 斜坡補償
數字電流模式控制中的設計問題
采用數字電流模式控制克服了模擬電流模式PWM控制器的許多局限性。SMPS中的數字電流模式控制非常有價值,因為它提供了許多功能,如晶體管峰值電流保護、消除磁性元件中的磁場“棘輪效應”、輸入電壓變化抑制和簡單的控制回路補償。實現電流模式控制會帶來另一個好處,即使用誤差電壓控制電感電流的最大值,使電感成為電壓控制的電流源。作為電流源,電感不再在回路的頻率響應中產生極點。這樣,回路從無條件不穩定電路變為有條件穩定電路,這使得環路濾波器設計更加簡單。既然電流模式是如此優越的系統,為什么數字SMPS設計師仍然使用電壓模式控制呢?
許多DSC沒有模擬比較器和可以在PWM周期的適當點測量電感電流的ADC。缺少某些方法以在期望點及時精確地測量電流,DSC就必須不停地在PWM周期用ADC測量電感電流,以捕捉當電感電流達到期望值的“瞬間”。為了達到12位分辨率,需要在每個PWM脈沖進行多達2048次ADC電流轉換。所需的ADC的采樣速率為10億次/秒。另外,需要充足的處理能力來收集這10億次轉換,將每次轉換結果與誤差信號相比較,并在達到預期電流時,關閉PWM輸出。保守的說,這意味著需要一個每秒能執行10億條指令(BIPS)的處理器。顯然,這不是一種解決該問題的低成本設計方案。
DSC簡化了SMPS電流模式控制的設計
那么設計師如何在數字SMPS設計中實現電流模式控制?答案就是使用具有支持SMPS設計的外設的最新數字信號控制器(DSC)。
當用DSC實現SMPS設計時,有很多可行的方法可用來執行電流模式控制。例如,Microchip的dsPIC30F202X DSC有以下特性:高分辨率數字PWM發生器、以每秒兩百萬次的采樣速度異步采樣和轉換信號的ADC、帶相關的10位參考數模轉換器(DAC)的高速模擬比較器、30MIPS高性能具備DSP處理能力的控制器。










評論