基于STM32單片機的數據記錄裝置設計

引言
本文引用地址:http://www.104case.com/article/175162.htm本文針對電動汽車研究的實際需求,設計一款數據記錄裝置,該數據記錄裝置是搭建在電池能量管理系統基礎上的,通過與能量管理系統通信,記錄電動汽車實際運行時電池的外部狀態(如:電池電壓、電流、溫度等),一方面為了研究電池的工作特性,另一方面為了對能量管理系統的工作情況做驗證,為電動汽車動力電池的理論研究提供數據支持。
1 系統總體設計
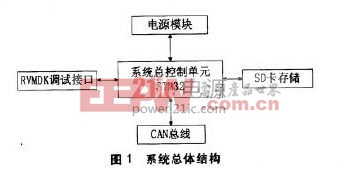
本數據記錄裝置的設計包括硬件設計與軟件設計兩方面,軟件設計主要包括數據接收的編程以及數據存儲的編程,而硬件設計主要有幾個方面:主控芯片的選擇、復位功能的實現、電源模塊、實時時鐘、通信模塊以及SD卡連接等。主控芯片是控制系統的核心,它內部所集成的模塊越多,就能省去更多的外部電路,使得電路的設計更加簡捷方便。電源模塊用來滿足系統各部分對于不同電壓的需求。實時時鐘,用來準確記錄系統時標。選用SD卡作為存儲裝置以適應系統海量數據存儲。基于現在市場上的電動汽車主要是CAN接口,所以本裝置用CAN進行通信。系統總體結構如圖1所示。
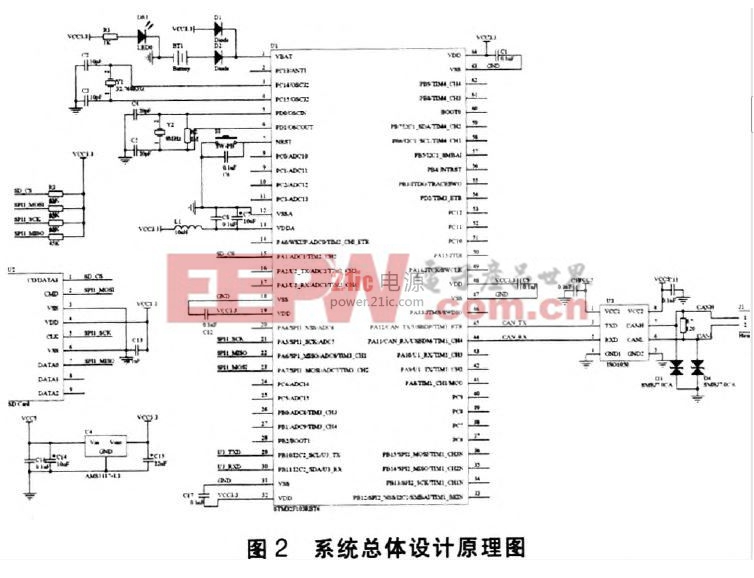
根據其實際功能,本數據記錄裝置的硬件部分設計原理圖如圖2所示。
2硬件設計
2.1主控制芯片選擇選擇STM32F103RBT6芯片作為系統總控制器,STM32F103RBT6是意法半導體有限公司的一款高性能、低成本、低功耗的處理器,它使用高性能的32位的RISC內核ARMCortex-M3,工作頻率為72MHz.它的價格較低,零售價大約12元左右。
2.2復位功能
STM32F103RBT內置兩個看門狗,兩個看門狗設備(獨立看門狗和窗171看門狗)可用來檢測和解決由軟件錯誤引起的故障,實現軟件復位;當計數器達到給定的超時值時,觸發一個中斷(僅適用于窗口型看門狗)或產生系統復位。STM32提供上電復位和掉電復位功能,給系統提供了更高的安全性、時間的精確性和使用的靈活性,使得程序運行更加高效,內置的復位功能可以滿足系統復位要求。
2.3實時時鐘
STM32F103RBT6中內置RTC實時時鐘,實時時鐘是一個獨立的定時器。RTC模塊擁有一組連續計數的計數器,在相應軟件配置下,可提供時鐘日歷的功能。修改計數器的值可以重新設置系統當前的時間和日期。RTC模塊和時鐘配置系統(RCC-BDCR寄存器)處于后備區域,即在系統復位或從待機模式喚醒后,RTC的設置和時間維持不變。系統復位后,對后備寄存器和RTC的訪問被禁止,這是為了防止對后備區域(BKP)的意外寫操作。
當主電源VDD掉電后,通過VBAT腳為實時時鐘(RTC)和備份寄存器提供電源,使用電池或其他電源連接到VBAT腳上,當VDD斷電時,可以保存備份寄存器的內容和維持RTC的功能。VBAT腳為RTC、LSE振蕩器和PCI3至PCI5端13供電,可以保證當主電源被切斷時RTC能繼續工作。切換到VBAT供電的開關,由復位模塊中的掉電復位功能。
2.4電源模塊
電源模塊為整個系統提供電源,STM32單片機要求2.0-3.6V的操作電壓,RTC部分需要電池提供后備電源,在這里VBAT采用CRl220紐扣電池和VCC3.3V混合供電的方式,在有外部電源(VCC3.3V)時,CRl220不給VBAT供電。而在外部電源斷開的時候,則有CRl220給VBAT供電。這樣VBAT總是有電的,以保證RTC的走時以及后備寄存器的內容不丟失。單片機供電方面,采用5.OV電源通過AMS公司的AMSlll7電壓轉換芯片為單片機提供3 3V的工作電壓。
2與通信接口
目前電動汽車能量管理系統主要應用的數據接口為CAN接口。在北美和西歐,CAN總線協議已經成為汽車計算機控制系統和嵌入式工業控制局域網的標準總線,并且擁有以CAN為底層協議專為大型貨車和重工機械車輛設計的31939協議,同時主控芯片STM32內置CAN控制器,只要外接CAN收發器就可以實現CAN通信。為了使系統具有盡可能的廣泛性,數據記錄裝置設計了CAN通訊接口適應系統的需要。
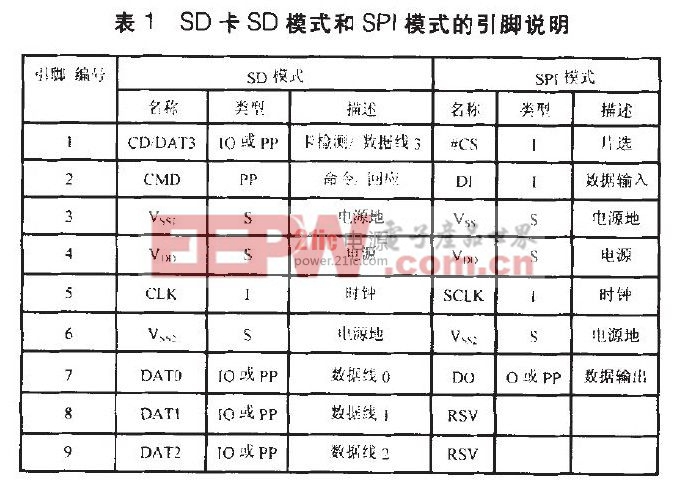
2.6 SD卡模塊SD卡允許在兩種模式下工作,即SD模式和SPI模式。引腳定義如表1所示:

單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理











評論