基于單片機的晶閘管觸發器的設計

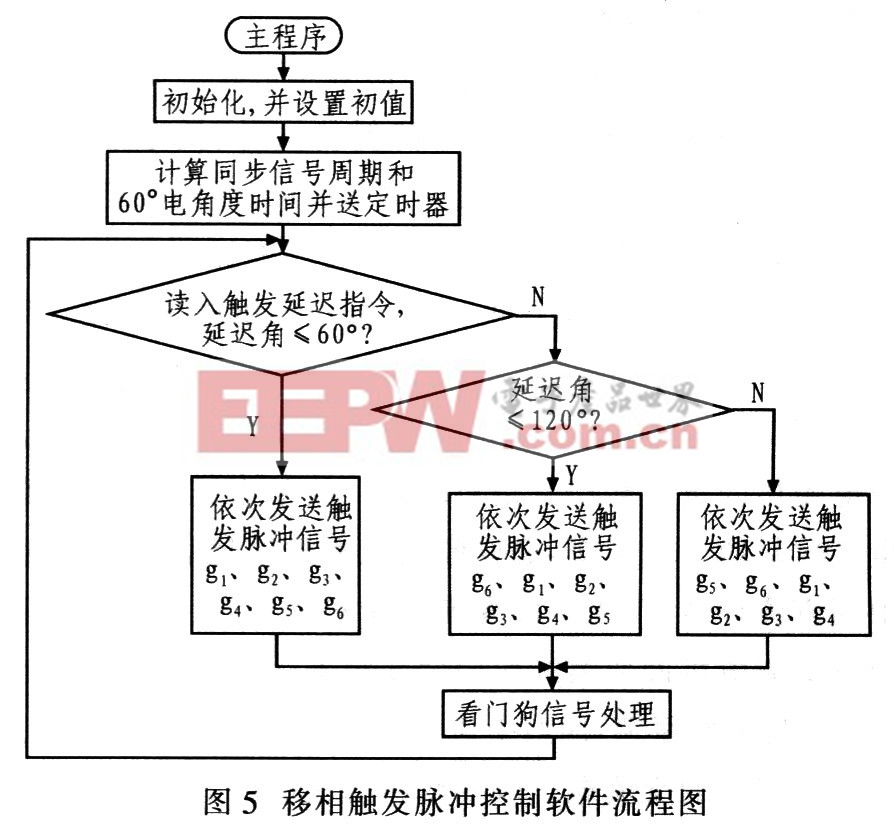
依照三相橋式全控整流電路晶閘管導通的時序要求,輸出觸發脈沖分為3種情況:
(1)當移相觸發延遲角α≤60°,此時以A相同步信號為基準,并按延遲角時間定時實現的第一個脈沖輸出,應該是A相VT1晶閘管的觸發信號,觸發延遲時間和觸發脈沖的時序無需調整,之后每隔60°時間依次輸出VT2、VT3、VT4、VT5、VT6晶閘管的觸發信號。
(2)當移相觸發延遲角60°α≤120°時,為保證觸發脈沖不遺漏,應將觸發延遲角的定時時間調整在60°時間之內,即減去一個60°時間。同時輸出觸發脈沖的時序也要進行調整,此時第一個輸出觸發脈沖信號應該是B相,VT6晶閘管的觸發信號,之后每隔60°時間依次輸出VT1、VT2、VT3、VT4、VT5晶閘管的觸發信號。
(3)當移相觸發延遲角α>120°時,要將觸發延遲角的定時時間調整在60°時間內,從而保證觸發脈沖不遺漏,則需減去一個120°時間,并且對觸發脈沖時序進行相應調整,此時第一個輸出觸發脈沖信號應該是C相VT5晶閘管的觸發信號,之后每隔60°時間依次輸出VT1、VT2、VT3、VT4晶閘管的觸發信號。
4 觸發器硬件組成
圖4給出單片機控制的移相觸發脈沖控制硬件電路圖。單片機選用AT89C2051,其屬于MCS一51系列小型單片機,共有20個引腳,2 KB內存。同步信號的輸入經電阻R1,R1起到限流和保護的作用,正弦同步信號經VD1和VD2兩個限制比較器輸入電壓的箝位二極管削波后,送入比較器LM339的輸入端,LM339輸出為180°與電源相位相同的方波。同步檢測信號發生正跳變時,經反相以中斷方式向單片機的INT0(引腳6)提供同步指令,從表面上看好像是外部中斷信號輸入,實際上是要量脈沖的寬度,這決定于信號到來的時間。使用該比較電路,無論輸入的同步電壓信號高還是低,LM339的輸出信號都能較準確的反映同步輸入信號的過零點,R2和C3對輸出信號進行濾波,以避免輸出信號出現波動。由于AT89C2051為8位單片機,所以該觸發器內部均為8位數字量計算,其觸發延遲角范圍為0°~180°,控制精度為0.7°,雖然控制精度受到內部運算位數的限制,但足以滿足一般控制要求。
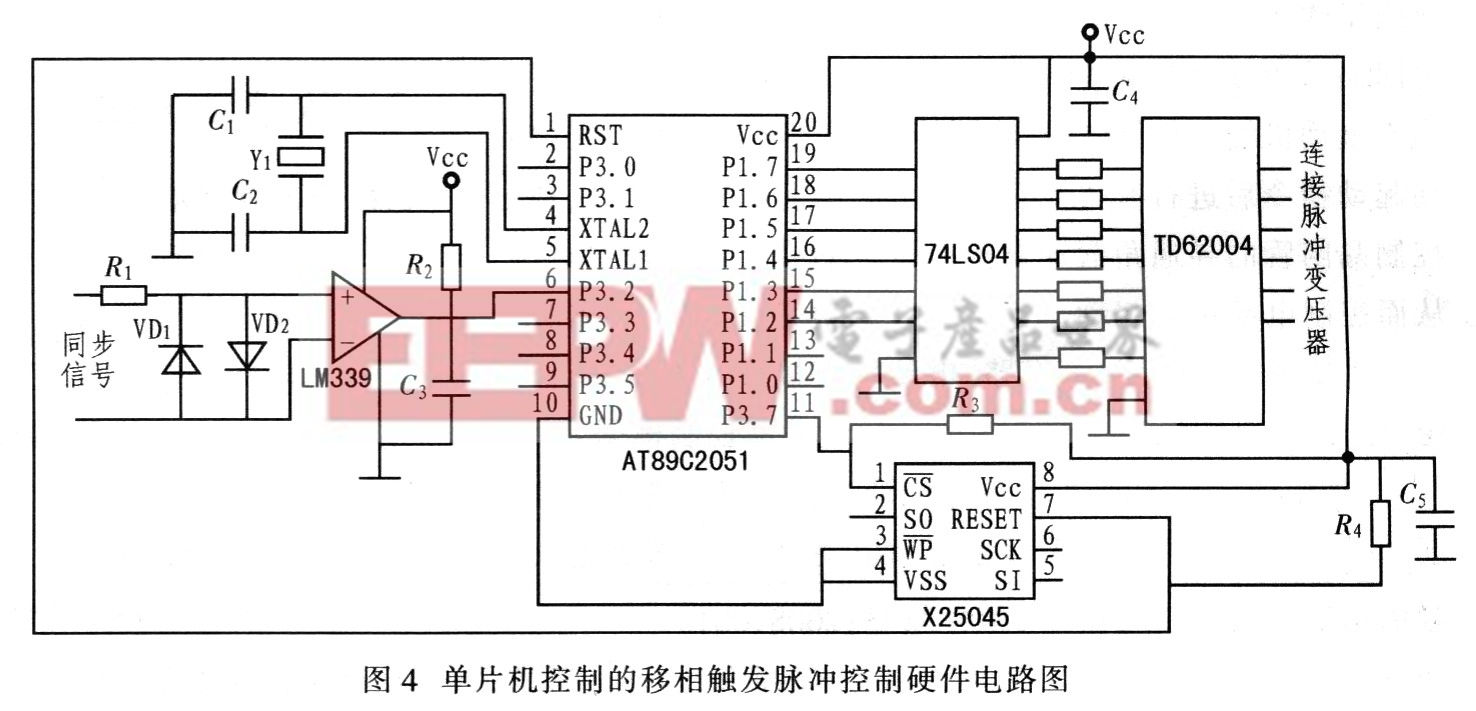
AT89C2051的Pl端口的P1.2~P1.7(引腳14~19)分別用于輸出三相橋式全控整流電路VT1~VT6的觸發脈沖信號,6路脈沖信號經741504反相放大,推動功率放大器TD62004,該器件的輸出連接到脈沖變壓器的初級繞組。為了使復位更可靠,采用先進的專用上電復位器件X25045,該器件具有可編程定時器,采用SPI總線結構。定時器看門狗的作用是保證在設定的時間內,若系統程序走死,不能定時訪問X25045的片選端,X25045將能對系統復位.提高了系統的可靠性,給單片機提供獨立的保護系統。其他的端口如P1端口的P1.0~P1.1(引腳12和13)可作為過壓、過流指示,P3端口的P3.4~P3.5(引腳8和9)作為過壓和過流的輸入端,P3端口的其余端口可以從整流端采集電壓負反饋信號經A/D轉換后進行數字PI調節,構成電壓負反饋閉環控制,以保證整流輸出端電壓穩定。
5 移相觸發脈沖控制軟件的設計
移相觸發脈沖的控制軟件可方便進行延遲計算,由軟件完成系統初始化、初值的輸入和電角度時間的計算并送入定時器,通過外部中斷實現觸發延遲角的處理。由于AT89C2051上電復位期間所有端口均輸出高電平,為了保證復位期間所有晶閘管都沒有觸發信號的觸發,應采用低電平為有效觸發晶閘管的信號。移相觸發脈沖控制軟件流程圖如圖5所示。
6 結語
在實驗中加入數字PI調節,構成電壓負反饋閉環控制,使輸出電壓穩定運行,提高了觸發脈沖的對稱度和穩定性,觸發延遲角最大可達180°,改善了觸發器的性能指標和變流裝置的可靠性。該設計方案實現了晶閘管觸發器的單片機控制,體現了控制電路簡單、便于調節且占用CPU資源少的特點,是一種理想的易于推廣的晶閘管觸發控制設計方案。










評論