基于MC9S12XSl28單片機的智能循跡小車的硬件設計

3 外圍接口和驅動電路板設計
3.1 電源管理模塊
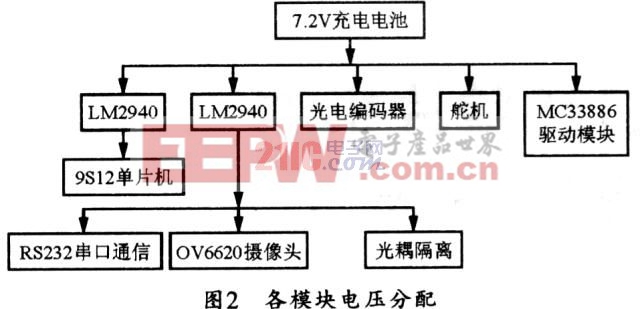
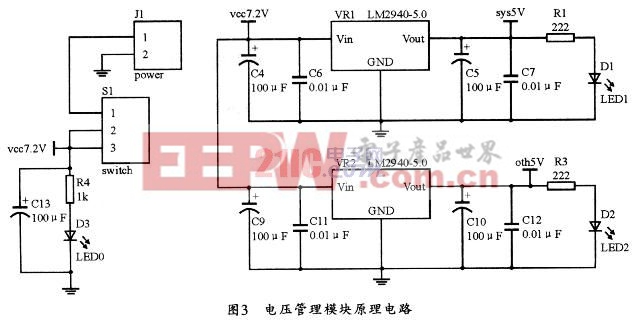
整個系統中各模塊的電壓分配如圖2所示。其中充電電池的7.2 V電壓經LM2940-5.0模塊轉換后,可產生5 V電壓分別供給MC9S12XSl28單片機和RS232電平轉換芯片、OV6620攝像頭模塊和光電耦合器件6N137,同時給核心控制器的MC9S12XSl28單片機單獨進行5 V供電以防干擾。單片機和MC33886電機驅動模塊之間則通過光電耦合器件進行連接。電池的7.2 V電壓則直接供給E6A2CS3C光電編碼器、舵機和MC33886驅動模塊。其電源管理模塊電路如圖3所示。
3.2 OV6620圖像采集模塊
OV6620攝像頭模塊采用OV6620彩色數字CMOS圖像傳感器,其圖像是NAL制,一幀圖像為356x292像素,數據格式為YCrCb4:2:2,GRB4:2:2和raw GRB。內部的I2C可編程用來調整攝像頭的參數(如最大灰度、對比度、曝光率控制等),其本質是SCCB協議的寄存器寫入。本設計采用默認模式,OV6620攝像頭模塊和MC9S12XSl28單片機的引腳連接圖如圖4所示。其中:Y0-Y7為灰度信號輸出引腳。由于本系統只需識別道路中黑線,故只需提取數據格式為YCrCb4:2:2中的亮度信號Y。灰度信號Y0-Y7則可送給MC9S12XSl28單片機的B口。
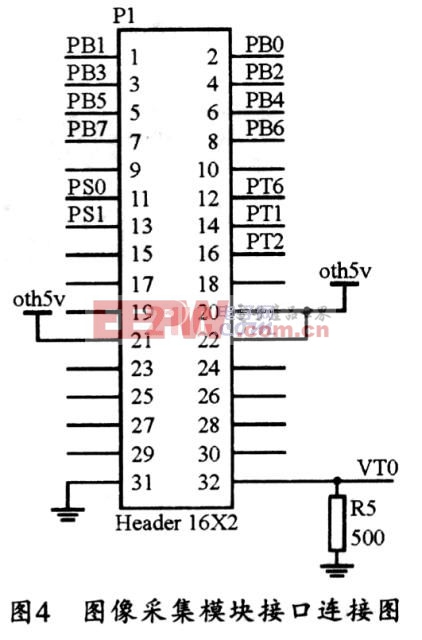
SCCB協議寫入的數據信號引腳SDA和數據時鐘引腳SCL分別連接MC9S12XSl28單片機的SCI接口的PS0、PSl引腳。
采集圖像數據的時鐘控制信號FODD(奇偶場同步信號)、HREF(行中斷信號)、VSYN(場中斷信號)分別接單片機中ECT。(增強型捕捉定時器)模塊中的PTl、PT2、PT6引腳。利用增強型捕捉定時器模塊的輸入捕捉功能,每個通道可以擁有單獨的中斷向量,各通道分別設置成不同的觸發極性,以滿足HREF(行中斷信號)要通過下降沿捕捉及VSYN(場中斷信號)要通過上升沿捕捉的要求。像素同步信號PCLK被忽略的原因是因為MC9S12XSl28單片機采集圖像的速度比CMOS的圖像輸出慢。
通過VTO模擬圖像輸出引腳可以外接監視器來查看采集圖像的質量。












評論