基于單片機(jī)控制的電子節(jié)氣門的研究與實(shí)踐

(2)節(jié)氣門位置傳感器
節(jié)氣門位置傳感器(兩個(gè)電位計(jì))的滑片與節(jié)氣門同軸,當(dāng)節(jié)氣門轉(zhuǎn)動時(shí),電位計(jì)滑片同步轉(zhuǎn)動,從而將相互監(jiān)測的節(jié)氣門開度信號轉(zhuǎn)換為電子信號輸出給單片機(jī)。
(3)直流伺服電機(jī)
通過對電機(jī)進(jìn)行PWM控制,再經(jīng)過兩級齒輪的減速,即可調(diào)節(jié)節(jié)氣門開度,本節(jié)氣門的齒輪減速比為:本文引用地址:http://www.104case.com/article/173373.htm

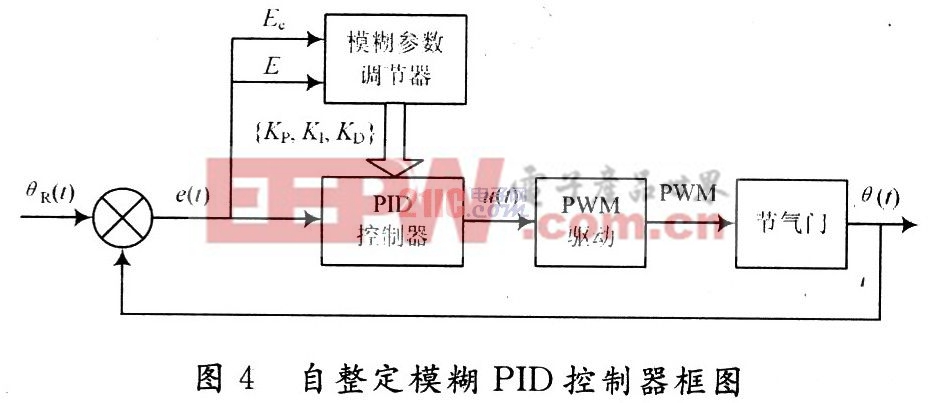
該系統(tǒng)輸入量是踏板輸入量θR(t),輸出量是節(jié)氣門開度θ(t)。模糊參數(shù)調(diào)節(jié)器的輸入量是油門踏板的踏入量θR(t)和θ(t)節(jié)氣門開度之差E以及其變化率Ec。輸出量是PID調(diào)節(jié)器的3個(gè)控制參數(shù)為KP,KI,KD。系統(tǒng)根據(jù)傳統(tǒng)PID控制器得到專家經(jīng)驗(yàn)形成的模糊控制規(guī)則進(jìn)行推理判決,從而對PID調(diào)節(jié)器3個(gè)控制參數(shù)實(shí)現(xiàn)在線自調(diào)整,以形成不同的PWM輸出信號,從而完成對氣門直流電機(jī)的控制。
3 控制系統(tǒng)軟件設(shè)計(jì)
3.1上位機(jī)軟件設(shè)計(jì)
為了便于系統(tǒng)運(yùn)行和檢查調(diào)節(jié)效果,采用上位機(jī)軟件進(jìn)行輔助控制。之所以選擇Matlab 7.0做GUI控制,主要是因?yàn)镸atlab強(qiáng)大的技術(shù)支持平臺,其信號處理功能和圖形效果的優(yōu)越性是VC#或VB 6.O等目前常用的上位機(jī)軟件無法替代的。本系統(tǒng)GUI主要功能包括:模式選擇、系統(tǒng)運(yùn)行、過流和握手應(yīng)答顯示等,上位機(jī)軟件界面如圖5所示。

介紹如下:
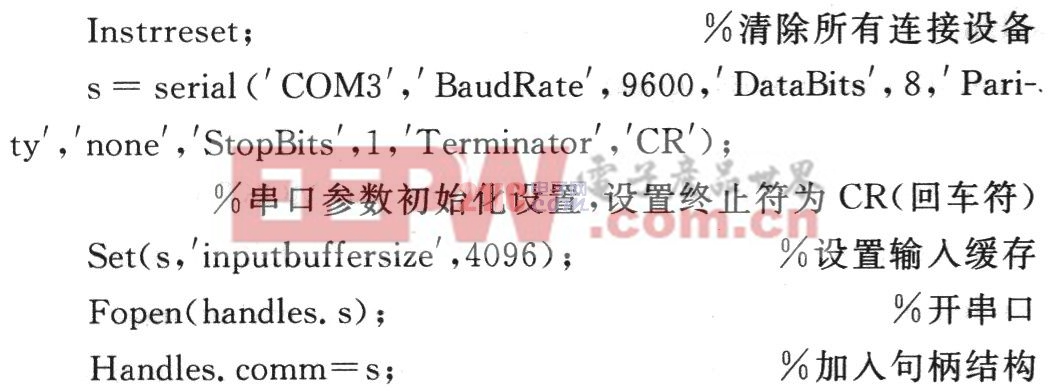
系統(tǒng)上位機(jī)和下位機(jī)采用串行異步方式,通信協(xié)議如下:波特率9 600 b/s,起始位1位,停止位1位,無校驗(yàn)位。串口數(shù)據(jù)的讀取,采用查詢方式,讀取串口數(shù)據(jù),柔用連續(xù)接收數(shù)據(jù)(continuous)的缺省方式,因而下位機(jī)返回的數(shù)據(jù)自動地存入輸入緩沖區(qū)中。
軟件串口初始化設(shè)置如下:
用戶可根據(jù)需要,選擇串口。設(shè)計(jì)上,采用彈出框形式,其回調(diào)函數(shù)為:
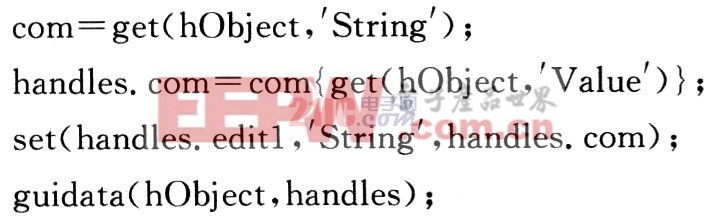
參數(shù)設(shè)置好后,用戶通過“參數(shù)傳遞”按鈕,向下位機(jī)傳遞運(yùn)行模式等相關(guān)運(yùn)行參數(shù)。得到響應(yīng)后,用戶再通過運(yùn)行按鈕啟動系統(tǒng)。在設(shè)計(jì)中,為了實(shí)現(xiàn)交互式的輸入,在調(diào)用set和get等回調(diào)函數(shù)時(shí),還應(yīng)特別注意數(shù)據(jù)類型的轉(zhuǎn)換,否則,就無法實(shí)現(xiàn)交互式的操作。












評論