利用ATmega16L設計的溫度控制系統

(4)增量式PID處理程序 該溫度控制系統具有滯后性、時變性和非線性,不可能建立該系統的精確數學模型,因此如果使用常規的線性控制理論,要達到滿意的控制效果非常困難。采用 增量式數字PID控制器,可解決這個難題。
增量式PID是指數字控制器的輸出只是控制量的增量,由于計算機輸出的是增量,所以誤動作時對輸出的影響較小。控制增量的確定僅與最近的k、k-1、k-2次的采樣有關,所以能夠較容易地通過加權處理而獲得較好的控制效果。另外,對于數字控制系統,由于A/D轉換器位數的限制,其輸出控制量受最小和最大值的限制,系統加入抗積分飽和法對其優化。圖5為增量式PID控制算法程序流程。
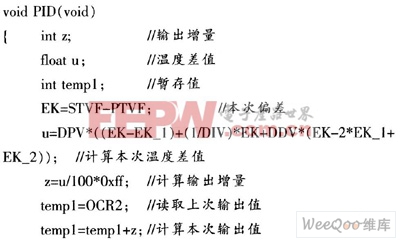
以下是增量式PID控制的程序代碼:
(5)串行通信程序 系統與上位計算機之間采用RS-488的串行數據傳輸方式。單片機采用中斷方式接收數據,而發送數據則采用查詢方式。
(6)顯示處理程序 LCD-TC1602A LCD接口設計采用4位控制方式,使用4位數據線D4~D7控制時序分兩次傳送,先傳送高4位數據,再傳送低4位數據。
(7)數據讀寫處理程序 ATmega16單片機內部集成有512 B的EEPROM,它是作為一個獨立的數據空間而存在的。ATmesa16單片機通過對相關寄存器的操作實現對EEPROM按字節讀寫。
(8)看門狗處理程序 ATmega16單片機內部集成有硬件看門狗,看門狗由片內獨立的振蕩器驅動,設置看門狗的步驟為:先初始化并打開看門狗,然后把喂狗指令放在循環程序中。
4 系統測試分析
各個模塊測試完成后,將下位機由測試端的硬件通過串口與PC機連接,構成完整的溫度測試系統。在上位機中運行Visual Basic編寫的監控程序,通過下位機的鍵盤設置加熱爐溫度為80℃.單擊“打開通信端口”,選擇所要通信的端口后,單擊“開始測溫”,這時下位機就會向上位機發送實時溫度值,并實時繪出溫度趨勢曲線。
當單擊“結束”時,整個系統停止工作。上位機顯示的溫度趨勢曲線如圖6所示,測試結果顯示,該系統對加熱爐溫度的采集和控制比較準確。

5 結束語
充分利用AVR ATmega16單片機的內部資源,系統集成 度高,系統利用增量式PID算法改變PWM的輸出值,然后控制可控硅的開關,最終使被控對象的溫度值趨向于給定的溫度值。該系統操作容易、可靠性好,具有較高的實用價值。就其采樣頻率和分辨率來說屬于中速類型,適合于對數據采樣頻率要求不是特別高的應用場合。













評論