基于C8O51F04O單片機(jī)的溫度遙測遙控系統(tǒng)

3.3 溫度控制PID實(shí)現(xiàn)
PID控制是控制工程中技術(shù)成熟、應(yīng)用廣泛的一種控制策略,經(jīng)過長期的工程實(shí)踐,已形成了一套完整的控制方法和典型的結(jié)構(gòu)。PID的工作基理是:由于來自外界的各種擾動不斷產(chǎn)生,要想達(dá)到現(xiàn)場控制對象值保持恒定的目的,控制作用就必須不斷地進(jìn)行。若擾動出現(xiàn)使得現(xiàn)場控制對象值發(fā)生變化,現(xiàn)場檢測元件就會將這種變化采集后經(jīng)變送器送至PID控制器的輸入端,并與其給定值進(jìn)行比較得到偏差值,調(diào)節(jié)器按此偏差并以我們預(yù)先設(shè)定的整定參數(shù)控制規(guī)律發(fā)出控制信號,去改變調(diào)節(jié)器的開度,使之增加或減少,從而使現(xiàn)場控制對象值發(fā)生改變,并趨向于給定值,從而達(dá)到控制目的。其實(shí)PID的實(shí)質(zhì)就是對偏差進(jìn)行比例、積分、微分運(yùn)算,根據(jù)運(yùn)算結(jié)果控制執(zhí)行部件的過程。控制方案如圖4所示。
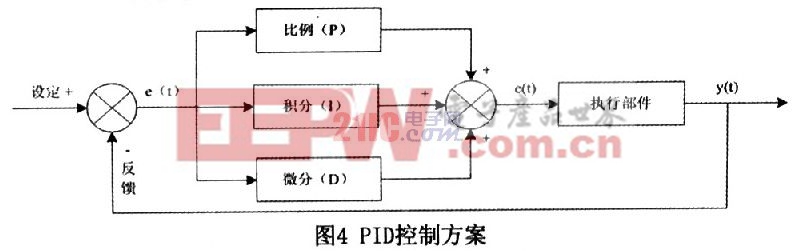
PID控制器的控制規(guī)律可以描述為:

本設(shè)計利用了上面所介紹的位置式PID算法,將溫度傳感器采樣輸入作為當(dāng)前輸入,然后與設(shè)定值進(jìn)行相減得偏差,再對偏差值進(jìn)行PID運(yùn)算產(chǎn)生輸出結(jié)果,最后控制定時器的時間進(jìn)而控制加熱器。
4 結(jié)束語
溫度遙控遙測是工業(yè)上使用比較多的一種控制技術(shù),本文就是針對溫度遙控遙測所進(jìn)行的探討與實(shí)踐。設(shè)計采用PID控制算法大大減少超調(diào)量,提高控制精度。由于傳感器和其它器件本身并非理想線性,程序中對實(shí)測數(shù)據(jù)進(jìn)行了線性補(bǔ)償。經(jīng)過大量的實(shí)驗(yàn),觀測數(shù)據(jù),優(yōu)化系統(tǒng),最終得到的實(shí)驗(yàn)結(jié)果精度較高。水溫控制準(zhǔn)確,雙向通信良好,上位機(jī)界面完整、優(yōu)美。希望本文提出的方案能對大家在溫度遙控遙測的設(shè)計與應(yīng)用方面有所幫助和啟示。











評論