無線收發的聲音導引系統

摘要:設計以STC89C58單片機為核心的最小系統。采用L297與L298控制、驅動步進電機;音頻放大器采用CX20106芯片,信號頻率選擇、放大性能好;同時具有433 MHz無線接收發模塊等。音頻接收器接收小車發出的15 kHz音頻信號,通過采集、放大、濾波等環節傳送至接收端單片機;利用時間差作為變量,將對應的信息無線發送回小車處理器,控制小車移動到達預定位置。
關鍵詞:聲音導引;無線收發;運算放大;STC89C58
引言
聲音引導在工業、民用等領域有著廣闊的應用空間。本文基于主從兩塊單片機設計了聲音引導電動小車運動系統。該系統由可移動聲源(智能小車)和聲音接收控制電路等組成。其主要功能是由聲音接收控制電路接收并處理移動聲源發出的聲音信號,通過無線的方式向移動聲
源控制電路發送方位、速度等信息,使移動聲源達到預期的目標。系統的移動聲源采用了步進電機驅動的小車,角度、位移控制較為精確。
1 系統硬件設計
系統硬件總體框圖如圖1所示。主控、從控單片機為宏晶科技的STC89C58。

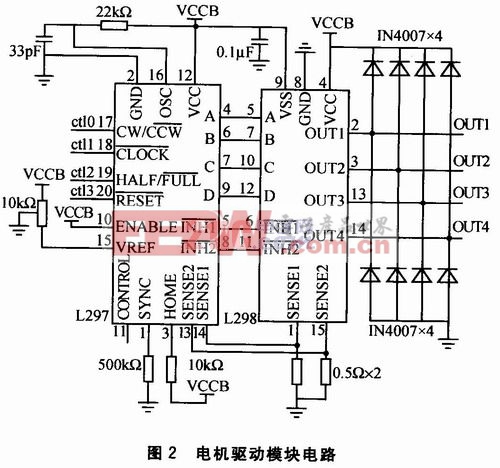
1.1 電機驅動模塊
電機驅動模塊電路如圖2所示。驅動模塊采用L298驅動芯片和L297電機控制芯片。L298驅動芯片是性能優越的小型直流電機驅動芯片,可用來驅動兩個直流電機或者是一個步進電機;在4~46 V的電壓下,可以提供2 A的驅動電流。L298還有過熱自動關斷功能,并有反饋電流檢測功能,符合電機驅動的需要。L297芯片為電機驅動的前級電路,主要用來產生格雷碼,避免了用單片機引腳直接控制所造成的資源浪費。
本系統采用的是步進電機。步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步進角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點,在速度、位置等控制領域用步進電機來控制變得非常簡單。
采用步進電機作為電動車的電動機,可以通過脈沖控制實現速度與精度兼得。












評論