基于STM32控制的聲音導引系統

3.1 移動聲音模塊
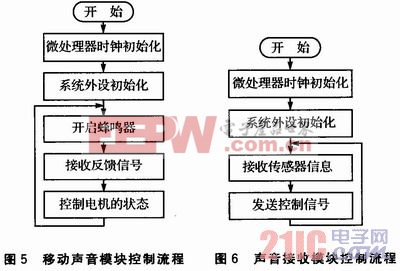
本模塊主要實現移動聲音控制器的功能。利用延時的方法產生高低電平來驅動蜂鳴器產生聲源。通過SPI串口和NEC的從控芯片進行通信,發送命令進而來控制電機的運行狀態。通過無線模塊接收的信息先暫存在SPI的緩沖區中,以備控制命令及時發送。發送的控制命令有前進、后退、左轉、右轉和停止信號。移動聲音模塊控制流程如圖5所示。本文引用地址:http://www.104case.com/article/172987.htm
3.2 聲音接收模塊
本模塊的功能主要是循環接收傳感器的信息,根據3個接收器傳回聲音的順序不同,來判斷移動聲音的位置和運行狀態,進而將前進、后退、左轉和右轉控制命令發送給移動聲源。由于該控制器的采樣頻率要高,因此把主控制器的時鐘頻率通過PLL調到最大72 MHz。聲音接收模塊控制流程如圖6所示。
4 系統測試
測試儀器包括:100 MHz數字示波器,數字萬用表(型號VICTOR-VC890D),STM32單片機開發板,秒表,卷尺。
用示波器觀測單片機、MMC-1芯片的輸入/輸出引腳信號波形,用數字萬用表檢查元件有無虛焊,從而確定對電機的驅動情況。
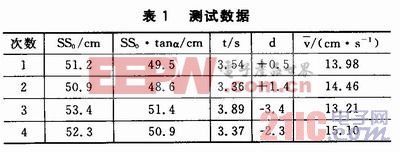
用秒表、卷尺測試小車運動的平均速度,并量取定位誤差。假設小車初始位置為S0,小車停止位置為S且SS0與間夾角為α,全程運動時間為t,S與0x線間距離為d,則小車平均速度為SS0·tan(α/t)。
測試數據如表1所列。
結語
可移動聲源開始運動并發出聲音,3個聲音接收器收到來自可移動聲源的聲音信號后,立即發出各自載波頻率的反饋信號給可移動聲源。可移動聲源根據接收到的不同信號頻率判斷反饋信號的源頭,從而由MCU發出相應控制信號(前進、倒退和轉彎),導引可移動聲源在定位誤差的范圍內。












評論