一種新穎的太陽能追蹤采集系統設計

2.2 太陽能電池板角度調整
系統綜合光電追蹤和視日運動軌跡兩種追蹤方式的優點,從外部時鐘芯片中讀取時間,根據時間和太陽角度的關系,每隔一段時間進行一次角度的調整,調整到預定的方位角和俯仰角(通常是稍大于準確角度);在運動過程中,AD12會記錄各個位置的光強值,產生光照強度系列值,然后控制步進機再把太陽能電池板精確調整到光照強度最強的位置上。太陽能電池板角度調整的流程圖如圖7所示,當時間在MIN_TIME和MAX_TIME之間時,每隔一段時間MINUTE_PER_RUN進行一次角度調整,先是根據時鐘時間調整到預定位置,再是根據光電檢測強度精確調整到光照最強位置(時間上限、下限和每隔多少分鐘檢測一次太陽高度可軟件設定,系統默認MIN_TIME=6,MAX_TIME=18,MINUTE_PER_RUN=15,即時間在6:00到18:00之間,每隔15 min調整一次)。
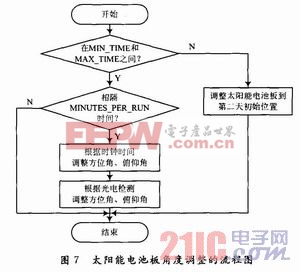
當時間不在MIN_TIME和MAX_TIME之間時,即時間已經到了晚上,系統要做的就是把機械裝置調整到初始位置,也就是第二天的開始位置,然后系統就進入待機狀態,機械裝置不在運動,直至第二天的MIN_TIME以后。
3 實驗
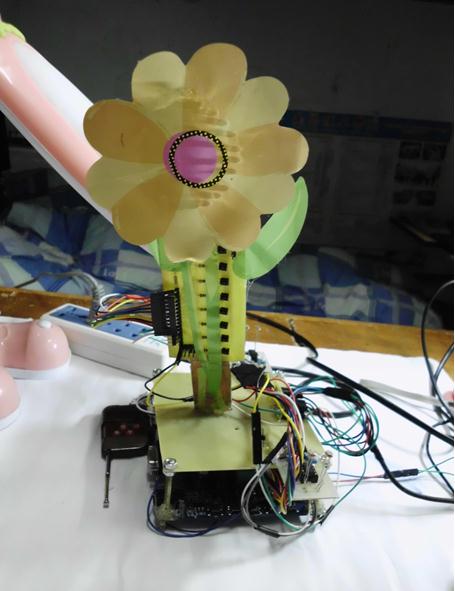
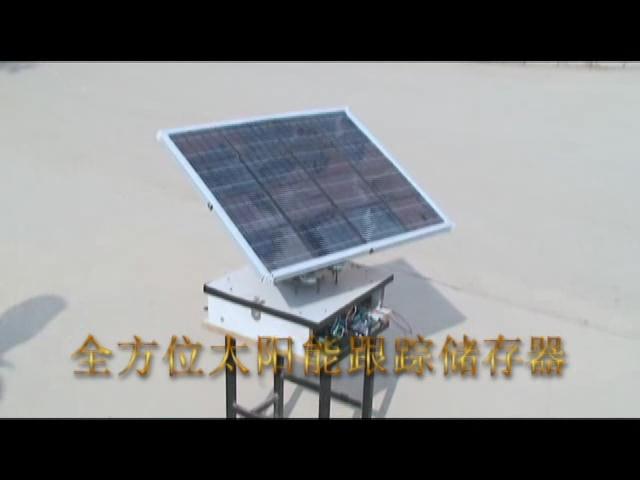
太陽能追蹤采集系統的設計實物模型如圖8所示,分別為無線數據接收端、無線數據發送及控制端和機械裝置端。

經過實際測試,系統能夠正確驅動機械裝置,能在MIN_TIME到MAX_TIME范圍內,而且每隔一段時間MINUTE_PER_RUN太陽能電池板調整一次,實現了對太陽進行精確、快速追蹤;太陽能電池板工作正常,可以有效地為鋰電池充電;實現了液晶顯示和復雜的鍵盤動作相協調,可以圖形化觀測電池電量,為系統設置時鐘時間;光電檢測、溫度、實時時鐘、無線射頻等模塊能夠正常運行,通過無線傳輸數據,單片機和上位機的串口通信,能夠遠程監控。系統達到且超出了預期目標,滿足設計要求,能夠穩定可靠的運行,實現了太陽能的自動追蹤采集控制。
4 結語
太陽能追蹤采集系統利用步進電機雙軸驅動,通過對機械裝置端進行水平、俯仰兩個自由度的控制,先是根據時鐘時間調整太陽能電池板到預定位置,再是根據光電檢測精確調整到光照最強處,能實現對太陽的全天候追蹤及精確、快速定位,使追蹤太陽更加穩定可靠。通過液晶顯示和無線射頻傳輸,既可現場監控又可遠程監控太陽光照強度、天氣溫度、充電池電量狀態和時鐘時間等信息。通過鍵盤的動作則能完成液晶屏幕的切換、時間的調整以及圖形化顯示,而且將以太陽能電池板充電的鋰電池作為實時時鐘DS1302的備用電池,可在系統斷電的情況下使實時時鐘依然正常工作,從而保持準確的時鐘時間。如果研究并設計電源管理模塊,把系統的外部供電電源、給太陽能充電的電源、電機使用的電源和其他芯片使用的電源統一整合,分別管理,就可以實現系統的太陽能自供電。








評論