基于MCS-51單片機的智能機器人迷宮車設計

1.2 迷宮車控制程序設計
控制算法:
迷宮車一般有四種控制算法:
(1)靠左算法
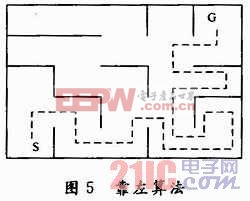
①默認靠左走法。即一直沿著左墻壁走,左邊有墻時一直沿著左邊墻壁前進,當左邊沒有墻時左轉,然后繼續靠左邊墻壁運行。該算法使用于最簡單的迷宮走法。如圖5所示,其中虛線表示小車前進的路線。本文引用地址:http://www.104case.com/article/172754.htm
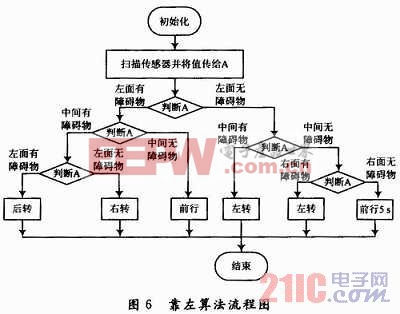
②算法流程圖如圖6所示。
③靠左算法的弊端。按照該算法,小車在走第二遍迷宮的時候,可以一次性的走出迷宮,但是這條道路不一定是最短的道路;如果迷宮本身存在“孤島”,那么小車很有可能走不出迷宮。如圖7所示。圖7中兩個圓點分別表示入口和出口,小車從入口進入迷宮,靠左前進則會導致小車一直按照虛線所描繪出的路線一直在迷宮里循環,終走不出迷宮。

(2)靠前算法
①靠前算法即一直沿著前方道路前行(前方沒有任何障礙時一直前進),當前邊沒有墻時判斷左邊,左邊沒墻左轉,左邊有墻則判斷右邊。然后重復該循環。該算法使用于最簡單的迷宮走法。
②算法流程圖如圖8所示。
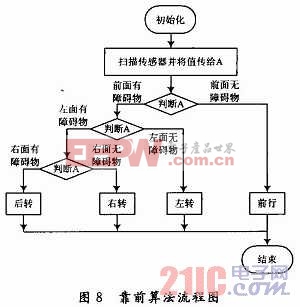
③程序思路:前邊沒墻靠前走,前面有墻判斷左邊,左邊沒墻靠左轉,左邊前邊都有墻再判斷右邊,右邊沒有墻靠右轉,三面都墻直接后退轉180°,繼續靠前走。0表示有墻,1表示沒墻,p3.0表示左傳感器;p3.1表示前傳感器;p3.2表示右傳感器。
轉角控制思路:計算輪子的轉速,測出小車轉90°時每個輪子所行的路程,用路程來除速度,求出一個時間作為小車轉彎時的延遲時間,再通過調試進一步精確轉角。












評論