基于Atmega16單片機的重物提升控制系統設計

5 重物提升位移量的計算
Atmega16微處理器內包含3個獨立的定時器/計數器模塊,其中T/C0、T/C2是8位定時器/計數器模塊,T/C1是16位的定時器/計數器模塊。硬件設計中選擇T0、T1作為正反轉計數器,記錄光電編碼器輸出的正、負脈沖數。在軟件設計中一定要將T0、T1計數器進行擴展,使其有足夠的計數空間,擴展位移測量范圍。筆者在設計軟件時,將T0、T1進行擴展,使它們都是長整數(32位)形式,利用的就是計數器滿產生溢出中斷的形式擴展的。這樣T0計數256個脈沖產生中斷一次, T1計數65 536個脈沖產生中斷一次。
T0、T1控制寄存器設置及產生溢出中斷程序為:
…
TCCR0=0x06; //計數脈沖由T0引腳輸入,下降沿有效。
TCCR1B=0x06; //計數脈沖由T1引腳輸入,下降沿驅動
有效。
…
#pragma interrupt_handler timer1_ovf_isr:9//正計數 16bits
void timer1_ovf_isr(void){
cnt1++; //32位計數
}
#pragma interrupt_handler timer0_ovf_isr:10 //負計數8bits
void timer0_ovf_isr(void){
long c;
cnt0++; //32位計數
c=(cnt0>>8); //防止cnt0,cnt1溢出
if(c (cnt1>=c))
{cnt1-=c; //計算計數差值
cnt0=cnt00xff; //只保留低8位
} }
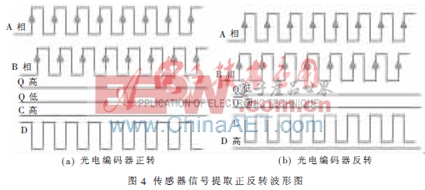
設計中,選擇型號為S38-J3V100光電編碼器,輸出編碼是500碼/轉,則脈沖當量是πd/500,當前的位移量就是總脈沖數與脈沖當量的乘積。軟件計算程序如下:
…
posicnt=(cnt116)|TCNT1; //正脈沖數
negcnt=(cnt08)|TCNT0; //負脈沖數
totalcnt =posicnt-negcnt; //產生位移量大的總脈沖數
curPosi=(totalcnt*(meterCyl*1000+ CentCyl));
curPosi/=PLS_PER_ROUND; //當前的位移量
…
執行運行命令,微處理器就要對設定的位移量進行計算,把位移量大小轉換成脈沖數的多少。在運行中進行脈沖數的比較,如果相等,則停止運行,表示已經達到目標位置。軟件計算程序如下:
sysStatus = SYS_RUN;
PosiSet=meterPosi*1000+CentPosi; //毫米計算
cntSet=(PosiSet*PLS_PER_ROUND)/(CentCyl+
meter Cyl*1000);
if(cntSet>totalcnt) Command=CMD_FWD;
//執行正轉命令
else if(cntSettotalcnt) Command=CMD_REV;
//執行反轉命令
else sysStatus=SYS_IDLE; //停止狀態
本方案設計的重物提升控制系統在實際運行過程中獲得了良好的動態性能,控制精確,智能化程度高。利用光電編碼器作為位移傳感器,能獲取高精度控制信號。高性價比的Atmega16單片機使成本大大降低,提高了軟件設計的靈活性,簡化了硬件電路設計,具有很好的實用價值。
參考文獻
[1] 李勁松.實軸增量式光電編碼器測量電路的設計[J].實驗室研究與探索 2007.26(2): 12~14.
[2] Atmel Corporation.ATMEG16 用戶手冊[Z].Atmel Corporation,2002.
[3] Atmega16/Atmega16L Datasheet: 8 b Microcont roller with 128K bytes in 2 System Programmable Flash[Z].
[4] 閻石.數字電子技術基礎[M].北京:高等教育出版社, 1997.
[5] 沈文,詹衛前. AVR單片機C語言開發入門指導[M]. 北京:清華大學出版社,2003.
[6] 馬潮,詹衛前,耿德根著.ATmega 8原理及應用手冊[M]. 清華大學出版社,1998.












評論