基于凌陽16位單片機的工頻表

2.2 數據保持部分
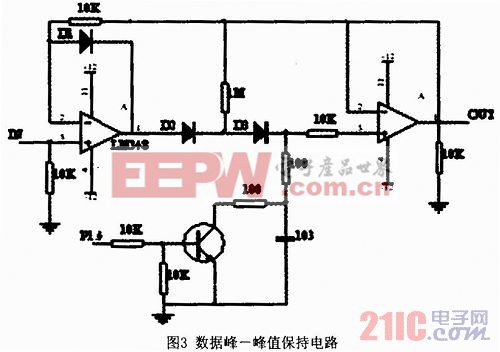
對電壓、電流信號進行同時測量,可用由集成運算放大器LM348組成的峰-峰值信號保持電路(如圖3所示),被測信號從IN腳輸入,OUT腳是對電壓、電流進行峰值保持功能,用凌陽單片機的一個I/O接口就可以對保持器進行控制。進行測量時,用單片機同時鎖定被測電壓和電流信號的峰-峰值信號后,即可以分別測量電壓和電流量,且不需要考慮時差問題。采用這種方案可減小系統帶來的誤差。本文引用地址:http://www.104case.com/article/172426.htm
3 單片機系統相位角處理模塊
相位角測量方法為先對電流信號和電壓信號分別測量。測量時,單片機先對電壓信號進行轉換,而此時電流信號被送到保持器進行保持,等待電壓信號處理完畢。電壓與電流相位差φ及功率因數cosφ的測量。電路得到的各點波形如圖4所示。其中Uv為正弦交流電壓,Ui為同一相正弦電流變換而成的電壓波。
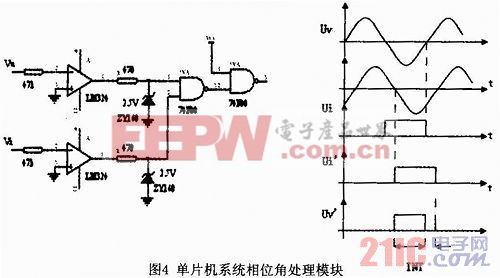
由于同一相內Uv和Ui之間有超前滯后兩種情況,且相位差均小于90°時,相功率P=0屬極少情況,故圖4分析了Ui滯后Uv的情況,對于Ui超前Uv,分析結論亦相同。由波形圖可見,U-I的相位差φ所允許時間Tφ=10ms-T。
因此只要測出T的時間,求出Tφ,再按上式計算出φ,cosφ亦可隨之求出。SPCE061A內部的十六位定時器在49.152MHz的晶振時每1μs加1,故可以用來測定T的時間。若定時器1LSB角度φ’,則φ’/0.02=180°/10ms,即φ’=1.44°。所以只要求出Tφ=1388H-T(T定時器讀出的計數值),再乘以1.44°即為φ的實際相位角。












評論