基于MSP430F149單片機與模糊控制的溫控儀設計

2.2 溫度控制電路
系統加熱絲與風扇均采用圖3所示電路形式。電路采用了晶體管驅動的直流電磁繼電器。當單片機的P5.4為低電平時,繼電器RL1吸合,當P5.4為高電平時,繼電器RL1釋放。采用這種控制邏輯可以使繼電器在上電復位或單片機受控復位時不吸合。繼電器由晶體管2N222A驅動,可以提供所需的驅動電流。本文引用地址:http://www.104case.com/article/172321.htm

3 模糊控制規則表及軟件流程圖
3.1 建立模糊控制規則表
采用溫度誤差E和溫度誤差變化率Ec作為模糊控制器的輸入變量,溫度控制量U作為模糊控制器的輸出變量。系統中溫度誤差E、溫度誤差變化率Ec和溫度控制量U(單位:℃)的基本域分別為[-5,+5],[-2,+2]和[0,1]。輸入語言變量的語言值取7個,輸出控制量用于控制繼電器驅動電路。將占空比模糊控制量設定為0,1/4,1/2,3/4,1五個單點模糊量和1個控制風扇吹風的單點模糊量。輸出語言變量的語言值取6個。當U=0時,單片機P3.5口置低電平,使風扇控制電路工作;當U=1時,加熱絲控制電路工作,且繼電器在1個周期內全關斷;當U=2時,加熱絲控制電路工作,且繼電器在1/4個周期內接通,在3/4個周期內關斷;當U=5時,加熱絲控制電路工作,且繼電器在1個周期內全接通。本控制系統選用三角函數、升半梯形函數與降半梯形函數作為輸入量語言值的隸屬函數,用脈沖函數作為輸出量語言值的隸屬函數。模糊控制規則如表1所示。
由模糊規則進行推理可以得出模糊控制器語言規則的輸入輸出關系,其關系是一個非線性的關系曲面。當偏差較大時,控制量的變化應盡力使偏差迅速減小;當偏差較小時,除了要消除偏差外,還要考慮系統的穩定性,防止系統出現過沖,甚至引起系統振蕩。
3.2 軟件流程圖
主程序軟件流程如圖4所示。
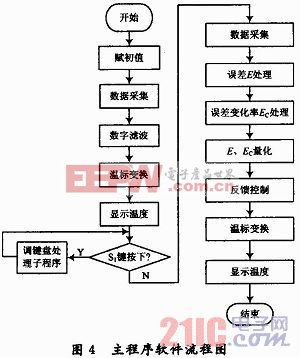
溫度采集和顯示、鍵盤處理等在編程時作為相對獨立的功能模塊來實現,并自主程序運行中按照設定的流程來調用,完成相應的任務后再返回主程序即可。
4 仿真分析
在Proteus仿真軟件中加入編譯后的HEX文件,使用分析圖表分析系統分析加熱器控制信號與風扇控制信號輸出端口的占空比。當輸入電壓為2.7 V時,系統的輸出顯示實際溫度為54℃,系統的設定溫度為55℃,此時P5.4輸出占空比為2:1的加熱器控制信號;而當系統的實際溫度大于設定溫度時,系統輸出適當的風扇控制信號以恒定的功率散熱,說明滿足設計要求。
5 結語
本系統采用低功耗MSP430系列單片機作為控制核心,整個控制電路較簡單,用模糊控制算法設計程序,設定溫度值與測量溫度值實時顯示,控制精度可達±0.5℃,在實際生產和生活中具有廣泛的實用性。












評論