基于51單片機(jī)設(shè)計(jì)的比例遙控系統(tǒng)

引 言
本文引用地址:http://www.104case.com/article/172302.htm遠(yuǎn)程控制技術(shù)又稱為遙控技術(shù),是指實(shí)現(xiàn)對(duì)被控目標(biāo)的遙遠(yuǎn)控制,在工業(yè)控制、家用電器、無(wú)線電運(yùn)動(dòng)以及兒童玩具等領(lǐng)域都有非常廣泛的應(yīng)用。遙控技術(shù)可以分為單通道遙控和多通道遙控,也可以分為開(kāi)關(guān)型遙控和比例型遙控。
本文主要介紹了使用到單片機(jī)部分的控制電路,包括發(fā)射機(jī)電路和接收機(jī)電路。發(fā)射機(jī)采用電位器分壓作為比例控制信號(hào),由4路A/D電路轉(zhuǎn)換為數(shù)字信號(hào),各個(gè)通道數(shù)字信號(hào)連同兩路開(kāi)關(guān)量由單片機(jī)進(jìn)行多通道編碼,編碼信號(hào)由串行口送出,最后由發(fā)射模塊發(fā)射。接收機(jī)主要負(fù)責(zé)把收到的信號(hào)放大并從中解調(diào)出編碼信號(hào),最后由伺服機(jī)把接收機(jī)收到的電信號(hào)轉(zhuǎn)換成相應(yīng)的機(jī)械動(dòng)作,由此實(shí)現(xiàn)方向和速度的控制。
外觀上,在遙控器的發(fā)射端應(yīng)該有帶旋鈕的比例表盤,把5 V電壓平均分成360°,每一個(gè)小的度量單位就代表一定的電壓值,當(dāng)旋鈕轉(zhuǎn)動(dòng)一定角度時(shí),也就是輸入給發(fā)射單片機(jī)一定的電壓值,與此同時(shí),發(fā)射單片機(jī)一直以一定的時(shí)間間隔去查詢當(dāng)前的速度并讀入到單片機(jī)內(nèi)部,并根據(jù)計(jì)算公式計(jì)算出模型應(yīng)該前進(jìn)的距離或者當(dāng)前應(yīng)該的速度且根據(jù)此值設(shè)置相應(yīng)的計(jì)數(shù)/定時(shí)器的初值,然后由系統(tǒng)外部驅(qū)動(dòng)電路(伺服機(jī))把接收單片機(jī)收到的電信號(hào)轉(zhuǎn)換成相應(yīng)的機(jī)械動(dòng)作,即前進(jìn)一定距離或者作加減速運(yùn)動(dòng);當(dāng)定時(shí)器溢出產(chǎn)生中斷以后,外部相應(yīng)的驅(qū)動(dòng)電路也幾乎同時(shí)發(fā)出控制信號(hào)控制模型停止任何動(dòng)作。
使用比例遙控的優(yōu)點(diǎn)有很多。例如:控制靈活;可以調(diào)整遙控的距離且調(diào)整的最大距離比一般遙控遠(yuǎn);可以根據(jù)使用者的意愿實(shí)現(xiàn)模型的速度改變;線路簡(jiǎn)單,抗干擾能力強(qiáng);伺服機(jī)構(gòu)(包括齒輪箱和伺服馬達(dá))簡(jiǎn)單等等。
1 比例遙控設(shè)備的基本原理
一般比例遙控系統(tǒng)的功能框圖如圖1所示。

圖1(a)中,鍵盤用于產(chǎn)生發(fā)射端控制信號(hào);編碼器對(duì)控制信號(hào)進(jìn)行編碼;顯示器顯示受控對(duì)象及其受控狀態(tài)類別;發(fā)射機(jī)將操縱指令轉(zhuǎn)換為帶有控制信息的無(wú)線電信號(hào)并將此信號(hào)進(jìn)行功率放大,以滿足發(fā)射功率的要求。
圖1(b)中,解碼器將編碼信號(hào)譯成控制信號(hào);控制器對(duì)受控對(duì)象實(shí)施控制;接收機(jī)接收發(fā)射機(jī)發(fā)出的無(wú)線電信號(hào),同時(shí)將接收到的信號(hào)放大并從中解調(diào)出編碼信號(hào),一般和發(fā)射機(jī)配套使用。由于接收機(jī)是裝在模型上的,一般都應(yīng)該盡量做到小巧,同時(shí)還應(yīng)具有很高的靈敏度,能接收較遠(yuǎn)距離發(fā)射的無(wú)線電信號(hào)。
遙控設(shè)備的基本工作原理是:操縱者通過(guò)手中的遙控發(fā)射機(jī)(撥動(dòng)發(fā)射機(jī)上的旋鈕或者搖桿)將控制模型前進(jìn)、后退、加速或減速的指令變成電信號(hào)并將其發(fā)射到空中;模型上裝載的遙控接收機(jī)收到這些電信號(hào)并由伺服舵機(jī)轉(zhuǎn)換成相應(yīng)的機(jī)械運(yùn)動(dòng),從而實(shí)現(xiàn)對(duì)模型的遙控。
2 單片機(jī)比例遙控系統(tǒng)的具體設(shè)計(jì)
無(wú)線比例遙控系統(tǒng)主要由發(fā)射和接收兩個(gè)部分組成,發(fā)射部分完成對(duì)遙控指令的發(fā)射,接收部分完成對(duì)指令的實(shí)施。在設(shè)計(jì)時(shí)可將其分開(kāi)設(shè)計(jì)。
2.1 發(fā)射電路
圖2為使用STCl2C2052AD單片機(jī)設(shè)計(jì)的比例遙控系統(tǒng)發(fā)射機(jī)的主電路。由于使用了單片機(jī),使整個(gè)電路變得非常簡(jiǎn)潔。P1口為比例遙控信號(hào)的輸入端;通過(guò)電位器分壓得到比例控制信號(hào),由4路A/D電路轉(zhuǎn)換為數(shù)字信號(hào),各個(gè)通道數(shù)字信號(hào)連同兩路開(kāi)關(guān)量由單片機(jī)進(jìn)行多通道編碼,編碼信號(hào)由串行口送出,最后由發(fā)射模塊發(fā)射。如果需要設(shè)計(jì)更多通道的比例遙控系統(tǒng),可以利用其余沒(méi)有使用到的P1端口,外接電位器進(jìn)行相應(yīng)的功能擴(kuò)展。當(dāng)沒(méi)有控制信號(hào)時(shí),P1口均為高電平。由軟件控制將P1口的控制信號(hào)(低電平有效)送到單片機(jī)內(nèi)部進(jìn)行相關(guān)處理。
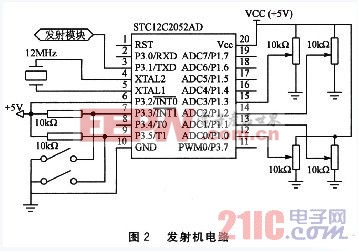
STCl2C2052AD是20腳封裝的單時(shí)鐘/機(jī)器周期的兼容8051 RISC型CPU內(nèi)核的單片機(jī)。它是本設(shè)計(jì)的核心器件,其速度比普通的8051快12倍;功耗低;片上集成256字節(jié)的RAM;15個(gè)通用可編程I/0口,可以設(shè)置成4種模式——準(zhǔn)雙向口/弱上拉、推挽/強(qiáng)上拉、僅為輸入/高阻、開(kāi)漏(其中復(fù)位后為準(zhǔn)雙向口/弱上拉模式);片內(nèi)有EEPROM功能;共有2個(gè)16位定時(shí)器/計(jì)數(shù)器;內(nèi)部還集成了RC振蕩器,在精度要求不高時(shí)可以省略外部晶振;具有較寬的操作電壓范圍以及獨(dú)立的片內(nèi)看門狗定時(shí)器;P1.7~P1.O共8路高精度的高速電壓輸入型8位A/D轉(zhuǎn)換器,速度可以達(dá)到100 kHz,可用于溫度檢測(cè)、電池電壓檢測(cè)、頻譜檢測(cè)等等,上電復(fù)位后P1口為弱上拉型I/0口,用戶可以通過(guò)軟件設(shè)置將8路中的任何一路設(shè)置為A/D轉(zhuǎn)換(不需要作為A/D使用的端口可以繼續(xù)作為I/O口使用,需作為A/D使用的端口要先將其設(shè)置為高阻輸入模式或者開(kāi)漏模式)。本設(shè)計(jì)中的單片機(jī)還可以由其他同類型的20腳封裝的51系列單片機(jī)代替,設(shè)計(jì)方法多種多樣。
2.2 接收電路
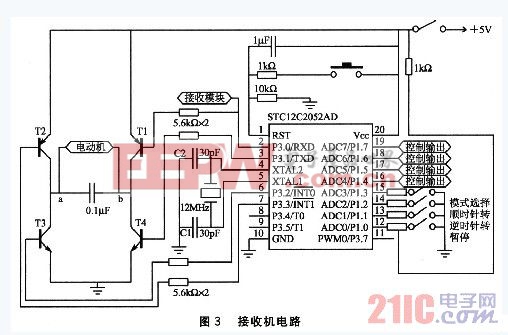
接收電路主要作用是將發(fā)射機(jī)發(fā)射出的已調(diào)的編碼指令信號(hào)接收下來(lái),并進(jìn)行放大后送到解調(diào)電路,解調(diào)電路將已經(jīng)調(diào)制的指令編碼信號(hào)解調(diào)出來(lái),還原為編碼信號(hào)。指令譯碼器將編碼指令信號(hào)進(jìn)行譯碼,最后由驅(qū)動(dòng)電路來(lái)驅(qū)動(dòng)執(zhí)行電路實(shí)現(xiàn)各種指令的操作控制。圖3為接收機(jī)主電路,發(fā)射機(jī)傳來(lái)的信號(hào)由P3.O輸入后送至P1口,由軟件控制P1的相應(yīng)端口輸出控制信號(hào)。P1口的4位A/D端口可以接到不同的控制端。由于是比例遙控,所以應(yīng)將輸出口的控制信號(hào)送到下一級(jí)比例遙控專用的伺服電路。
整個(gè)系統(tǒng)的執(zhí)行部分是由直流電動(dòng)機(jī)驅(qū)動(dòng)電路來(lái)完成的,主要控制模型的行進(jìn)方向和速度。單片機(jī)STCl2C2052AD既是協(xié)調(diào)整個(gè)接收機(jī)工作的控制器,又是數(shù)據(jù)處理器和運(yùn)算器,由于它直接有PWM功能,因此不需要占用單片機(jī)資源,可以直接產(chǎn)生占空比可變的脈沖信號(hào),對(duì)橋式雙向電路驅(qū)動(dòng)電動(dòng)機(jī)進(jìn)行電壓控制,從而完成對(duì)電動(dòng)機(jī)驅(qū)動(dòng)、轉(zhuǎn)速以及前進(jìn)或后退的控制,并能夠?qū)崿F(xiàn)脈寬精確調(diào)速。
圖3中,與單片機(jī)左邊相連的部分為電動(dòng)機(jī)驅(qū)動(dòng)電路。該電路由2對(duì)晶體管組成一個(gè)橋式互補(bǔ)對(duì)稱電路,其中包含了電動(dòng)機(jī)。電動(dòng)機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成階躍型的角位移或者直線位移的變換器,它的旋轉(zhuǎn)是以固定的角度(步距角)運(yùn)行的。當(dāng)4個(gè)晶體管均為低電平時(shí)(由芯片控制),這4個(gè)晶體管的集電極和發(fā)射極均不能導(dǎo)通,此時(shí)電動(dòng)機(jī)a端和b端均為O V,電動(dòng)機(jī)不能轉(zhuǎn)動(dòng)。當(dāng)P3.0和P3.2為高電平,P3.1和P3.3為低電平時(shí),晶體管T1和T3均導(dǎo)通,此時(shí)a端得到高電平,而b端與地相通,電動(dòng)機(jī)開(kāi)始轉(zhuǎn)動(dòng)。除去晶體管T1和T3的壓降,電動(dòng)機(jī)的兩端大概可以得到4.5 V的電壓。同樣道理,當(dāng)P3.1和P3.3為高電平,P3.O和P3.2為低電平時(shí),b端得到高電平,而a端與地相通,電動(dòng)機(jī)反轉(zhuǎn)。通過(guò)該橋式電路,控制P3.O和P3.2、P3.1和P3.3端口的電平(注意:這4個(gè)端口不能全部為高電平)便可以實(shí)現(xiàn)電動(dòng)機(jī)的正轉(zhuǎn)、反轉(zhuǎn)和停轉(zhuǎn),即實(shí)現(xiàn)了模型的前進(jìn)或后退。為了消除電動(dòng)機(jī)的電弧干擾,應(yīng)在電動(dòng)機(jī)兩側(cè)加一個(gè)小電容,其值為0.1μF。










評(píng)論