單片機控制的電壓和無功功率綜合自控系統

1 概述
本文引用地址:http://www.104case.com/article/172169.htm目前,國內35KV以上的變電站,廣泛采用有載調壓變壓器,并配置適當容量的并聯電容器組,以實現變電站電壓調整和功率潮流的平衡。但是這些設備如不采取合理的自動控制手段,單靠運行人員手動操作,顯然不能充分發揮其應有的作用。本文研究的目的在于利用單片機的計算、判斷與記憶等智能,實現系統在線負荷預測并進行控制決策,自動綜合調整有載調壓變壓器分接頭和電容器投切開關,以提高電壓質量和經濟運行。
2 工程控制算法
在考慮具有有載調壓變壓器和并聯無功補償電容器組兩種調壓方法時,組合調壓的效果為矩陣方程

式(2—1)中,ΔKn、ΔQc分別為變壓器變化調整量和并聯補償電容器的調整量,ΔU、ΔQ表示系統電壓和無功功率的調整效果。A為系數矩陣,它由變電站及供電線路的參數決定。如果計算出系數矩陣A,則在每一次調整變壓器變比或并聯補償電容量之前。先計算出調整效果,再作是否決定發出調整命令,從而作到調整效果的預報。但在實際應用中,系數矩陣A很難計算,基于此,筆者提出了如下簡化的工程控制算法。
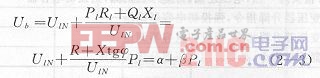
電力系統簡化網絡如圖2—1所示,假設有載調壓變壓器的一次側電壓、二次側電壓和變比分別為Ua、Ub和Kn,用戶負載電壓、視在功率、有功功率和無功功率分別為Ul、Sl、Pl、Ql,無功補償容量為Qc,則
由式(2—2)知,當Pl、Ql變化時,變電站到用戶的線路電壓損失ΔUl隨之變化,為了維持用戶電壓Ul基本不變,必須調整變壓器二次側電壓Ub,以補償線路電壓損失ΔUl,這便是逆調壓的基本思想。當要求用戶負載電壓為UlN時,二次側電壓Ub應為
由于變電站系統在一定的負荷下,其功率因數(cosφ)是變化不大或不變化的,因此,式(2—3)中的α和β近似為常數。由此可見,為了維護用戶負荷電壓Ul=UlN不變,Ub應隨Pl的變化而近似線性變化。即只有真正按負荷大小進行逆調壓,才能保證用戶電壓質量。同樣,可以類似地對無功功率補償分析,限于篇幅,在此不詳述。
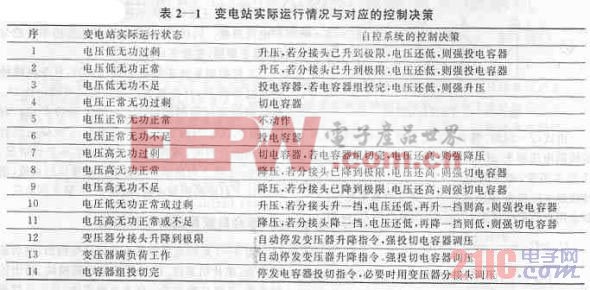
工程控制算法正是基于式(2—3),首先在線檢測實時負荷Pl,計算機變壓器二次應有的電壓Ub。然后根據實時檢測的電壓U測和無功功率Q測,對U測和Ub、Q測與給定的無功功率Q上限和Q下限進行比較和綜合判斷,得到14種變電站實際運行情況,如表2—1第2列所示。根據電力系統運行規范,系統設計了對應的控制決策,如表2—1第3列所示。
圖3—1是綜合自控系統的硬件結構圖,按功能可分為:單片機系統、信號測量與處理模塊、輸出控制模塊、升降位置與投切狀態反饋模塊、顯示及鍵盤 輸入模塊5部分。各部分功能簡述如下:
3.1 單片機系統
單片機系統主要由AT89C52、EEPROM構成,它是該系統的核心。為增強控制系統的抗干擾能力,以MAX812L作為電源監控電路,并提供手動復位電路。單片機系統選用的單片機是內部帶有8K字節FLASHROM的低功耗AT89C52。EEPROM采用具有電可擦除PROM的93C46芯片。 EEPROM93C46芯片主要用來保存系統設定參數,使綜合自控系統在關機或因故障停機后,其運行參數能得到保留,以便下一次開機后使用。
3.2 信號測量與處理模塊
信號測量與處理模塊主要包括PT、CT、變送器、信號采集電路和濾波電路。變送器采用FS系列電壓、有功和無功變送器。由于變送器輸出的信號包含交流分量達幾十mV,為了減小交流分量以及各種干擾對測量精度的影響,必須進行濾波,使各類交流分量的有效值減小為0.1mV以下。信號采集電路選用12位逐次逼近型AD574作為A/D轉換器,其轉換速度為25μs,轉換精度為0.05%,能進行單極性和雙極性模擬信號轉換,完全滿足本系統的要求,從而保證電壓調整精度為±0.5%,無功補償控制精度為±3%。
3.3 輸出控制模塊
本系統要控制2臺變壓器分接頭的升降和16組電容器的投切,由單片機P2口的高4位送出信號,低電平有效。系統中采用了固態繼電器SSR作為隔離手段,使單片機系統與被控對象之間沒有電的直接聯系,有力的保證了本系統的可靠運行。
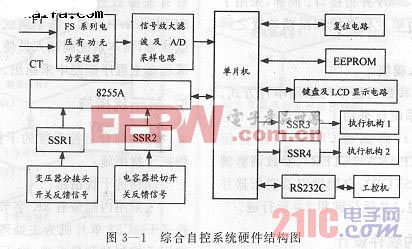
3.4 升降位置與投切狀態反饋模塊
為了獲取變壓器分接頭位置和電容器投切狀態信號,本系統擴展了8255A并行接口。同樣,采用了固態繼電器SSR作為單片機系統和反饋裝置之間的隔離。
3.5 顯示和鍵盤輸入模塊
本系統鍵盤輸入和數碼顯示均采用串行方式。為實現方便的鍵控,系統僅采用了14個鍵,其中包括:復位鍵(RESET)、調試鍵(TEST)、運行鍵(RUN)、參數功能鍵(PARAMETER)、參數調整鍵(←→↑↓)停止鍵(STOP)、自鎖鍵以及變壓器并列運行鍵、解裂運行鍵、1#運行鍵和2#運行鍵。
4 綜合自控系統的軟件設計
系統軟件采用人機對話方式和模塊化結構,根據綜合自控系統的功能要求,綜合自控系統軟件主要包括主程序模塊、計算與判斷決策程序模塊、變壓器分接頭升降管理程序模塊、電容器投切管理程序模塊、鍵盤處理子程序模塊等。限于篇幅,僅介紹主程序模塊。
圖4—1是系統主程序流程圖。首先進行初始化,包括設置堆棧指針、顯示分接頭當前位置、設置電容器投切指針、設定定時器方式和程序自檢等。然后,等待并檢測是否有鍵按下,若有鍵按下則根據鍵值執行散轉指令操作。若按下運行鍵,則綜合自控系統連續運行,這是主程序的核心。由于系統軟件采用人機對話方式和模塊化結構,所以主程序主要是調用各功能程序模塊。若按下參數鍵時,將依次顯示各個參數,在此狀態下可使用有關功能鍵和參數鍵可對有關參數進行修改,修改后的參數將被傳送到EEPROM中保存。按下調試鍵時,系統自動進入調試狀態,供本系統調試人員使用。參數鍵和調試鍵的流程在主程序框圖中未畫出。
5 抗干擾措施
針對綜合自控系統的干擾情況,提出了下面幾種抗干擾措施:
硬件抗干擾措施:
·采用內部帶有8K字節FLASHROM的低功耗AT89C52單片機為主處理器,其集成度高,廣泛應用于控制和測量系統,抗干擾能力強。
·采用高精度的傳感器和運算放大器。
·采用程序監視器(Watchdog)電路。從根本上解決程序跑飛和程序進入死循環。
·采用隔離技術。
·采用電源凈化技術。
軟件抗干擾措施:
·為防止本系統出現頻繁動作,提出了準動作狀態—動作狀態的軟件設計思想。其基本思想是:當本系統第一次判斷出系統處于不正常運行狀態時,本系統暫不發控制決策指令,稱為本系統處于準動作狀態。這時,本系統繼續進行采樣、比較、綜合判斷與控制決策,如果本次判斷出系統仍處于不正常運行狀態,且與上次的狀態相同,則本系統發出對應的控制決策指令,稱為本系統處于動作狀態;如果本次判斷出系統仍處于不正常運行狀態,但與上一次的狀態不同,則仍不發控制決策指令,但本系統處于新的準動作狀態;如果本次判斷出系統仍處于正常運行狀態,則本系統退出上一次的準動作狀態。
·為提高電力系統設備利用率、完好率和使用壽命,要求對每個電容器投切操作的概率要相等,提出了等概率指針法投切的軟件設計思想。
6 結論
以AT89C52為核心的電壓和無功功率綜合自控系統,適用于利用有載調壓變壓器和無功補償電容器組進行電壓和無功功率自動調整的變電站。本系統能真正的按照逆調壓原理,在線檢測負荷變化,自動調整變壓器分接頭升降和電容器投切,保證變電站負荷側母線電壓隨負荷變化,并使無功功率盡可能就地平衡。本系統抗干擾措施得力,系統可靠性高,操作簡單。
[參考文獻]
[1]J.B.Bunch,System Integrated Voltage and ReactivePower Control[J].IEEE Trans.Vol PAS101,No2,February,1982
[2]尹克力.電力工程[M].電力工業出版社,1987
[3]何德康.電氣二次回路安裝與檢驗[M].水利電力出版社,1988
[4]張毅剛等.MCS—51單片機應用設計[M].哈爾濱工業大學出版社,1990












評論