單片機多中斷處理技術研究

要處理多路中斷問題,中斷處理程序的算法大體上可以分為兩類:弱中斷優先級(使用CALL和RETURN方式)和強中斷優先級(使用GOTO方式)。其程序結構圖如下:
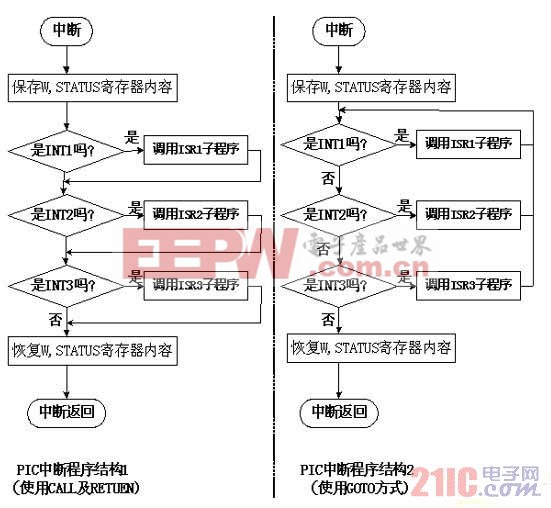
設第n個子程序的運行時間為Rn;同一個中斷源的兩次中斷最小時間間隔In,在中斷處理程序結構1中,中斷1,中斷2,中斷3的優先權級為中斷1>中斷 2>中斷3,這種方法在中斷處理中廣為使用。對于具有搶先優先級要求的程序可以通過第二個程序結構完成,即每執行完一個中斷程序都重新檢查該中斷程序的中斷標志位,如果其標志位又被置位,則執行該中斷。為了確保第二個中斷能夠執行必須要求R1I1,同樣第三個能夠執行的條件是R1+R2 I1+I2,第n個中斷能夠被執行的條件是Σ(Rn)Σ(In),同時這也是程序能從中斷中正常跳轉出來的條件。對于普通的程序設計,這樣的優先級一般能夠滿足用戶的使用需求,但對于較大的程序設計往往需要更高的優先級甚至超優先級,也就是說即使正在執行中斷程序,當超優先級中斷到來的時候,馬上就要停止當前工作,而去執行超優先級中斷。要實現這種中斷模式,完全可以在中斷程序中添加一個或者幾個判斷指令來實現。以上圖的GOTO結構方式為例,為了使ISR1擁有超高優先級,可以在ISR2中斷程序中加入如下指令:
BTFSC INT1,INTIF ;判斷INT1是否有中斷
GOTO INT1 ;是!執行INT1中斷
如果ISR2的程序較長或者ISR1的中斷級較高,可以在ISR2中加入多條這樣的語句。同樣道理,為了形成ISR2的次高優先級,可以在ISR3中加入指令:
BTFSC INT2,INTIF ;判斷INT2是否有中斷
GOTO INT2 ;是!執行INT2中斷
由此可以達到預期效果,這種方法主要是基于每個子程序的執行時間比較長而產生的,如果每個中斷程序的執行時間都很短,那么也就沒有必要犧牲這一個指令周期了,所以程序的設計應該力求中斷的簡潔。
為了能夠編寫好一個簡潔的中斷程序,應抓住中斷的特點是具有實時性,針對實時中斷數據采集系統,也就是中斷的特點在于數據的采集。因此在中斷程序中只應該處理數據采集和標志位的設置,而將數據的處理放在中斷之外,由主程序通過循環檢測執行數據處理工作,具體做法:先開辟一個儲存緩沖區,作為采集來的數據的傳遞媒體,即存儲采集數據,等待主程序的處理;中斷程序負責數據的采集,并且將采集來的數據值賦給存儲緩沖區;主程序通過條件循環語句反復檢測 存儲緩沖區情況,及時處理采集信息。這樣在處理方法既能有效的實現中斷的功能,又可以極大的縮減每個中斷的時間,提高整個程序的反應速度。
4.結束語:
從上看出,靈活地應用中斷,不但可以大量的節省CPU資源,而且能夠使程序更加簡化,具有更高的實時性和穩定性。在實際應用中應該注意將任務合理分配給中斷和主程序,二者要分工明確,接口簡單。這其中的技巧還需要在實踐中多多摸索與體會。











評論