單片機關鍵技術基礎詳解(五)

采用好的系統設計模式:
盡量不使用傳統的前后臺(中斷)系統設計模式,任務之間相互影響和干擾,無法定時操作。如設計一個采用動態掃描方式驅動的8位LED數碼管顯示+動態掃描的4*4矩陣鍵盤。
采用TimeTip+狀態機設計+CASE結構,實現多任務并行運行系統設計方法。或時間觸發式的系統設計。(見:《時間觸發嵌入式系統設計模式》中國電力出版社 2004.6)
移植小型嵌入式操作系統,如UCOS-II。在網上有些免費的基于AVR的簡潔的操作系統。
提高C語言的編程能力和軟件應用水平:
熟悉和用好C中的數據結構體、指針應用、內存管理等較高級的應用。
熟悉和了解你所使用的高級語言開發平臺的特點。這些平臺是針對某一類處理器的,包含許多特殊的不兼容的語句和擴展的結構、語句、函數等。盡管使用方便,但由于其不透明性和時間的不確定性,因此要合理使用。如C中的Getchar()、Putchar()等。AVR有多個開發平臺,每個都有其特點和不足。能夠綜合使用這些平臺,相互互補,能夠提高開發效率。如通過ICC、CVAVR的程序生成器CodeWizard學習和了解AVR的硬件設置,簡化計算,快速的生成程序基本模塊,如“一個URAT(RS232)低層驅動+中間層軟件示例”。
四、AVR單片機定時器輸出PWM的設計及注意問題
一、定時/計數器PWM設計要點
根據PWM的特點,在使用ATmega128的定時/計數器設計輸出PWM時應注意以下幾點:
1.首先應根據實際的情況,確定需要輸出的PWM頻率范圍,這個頻率與控制的對象有關。如輸出PWM波用于控制燈的亮度,由于人眼不能分辨42Hz以上的頻率,所以PWM的頻率應高于42Hz,否則人眼會察覺到燈的閃爍。
2.然后根據需要PWM的頻率范圍確定ATmega128定時/計數器的PWM工作方式。AVR定時/計數器的PWM模式可以分成快速PWM和頻率(相位)調整PWM兩大類。
3.快速PWM可以的到比較高頻率的PWM輸出,但占空比的調節精度稍微差一些。此時計數器僅工作在單程正向計數方式,計數器的上限值決定PWM的頻率,而比較匹配寄存器的值決定了占空比的大小。PWM頻率的計算公式為:
PWM頻率 = 系統時鐘頻率/(分頻系數*(1+計數器上限值))
4.快速PWM模式適合要求輸出PWM頻率較高,但頻率固定,占空比調節精度要求不高的應用。
5.頻率(相位)調整PWM模式的占空比調節精度高,但輸出頻率比較低,因為此時計數器僅工作在雙向計數方式。同樣計數器的上限值決定了PWM的頻率,比較匹配寄存器的值決定了占空比的大小。PWM頻率的計算公式為:
PWM頻率 = 系統時鐘頻率/(分頻系數*2*計數器上限值))
6.相位調整PWM模式適合要求輸出PWM頻率較低,但頻率固定,占空比調節精度要求高的應用。當調整占空比時,PWM的相位也相應的跟著變化(Phase Correct)。
7.頻率和相位調整PWM模式適合要求輸出PWM頻率較低,輸出頻率需要變化,占空比調節精度要求高的應用。此時應注意:不僅調整占空比時,PWM的相位會相應的跟著變化;而一但改變計數器上限值,即改變PWM的輸出頻率時,會使PWM的占空比和相位都相應的跟著變化(Phase And Frequency Correct)。
8.在PWM方式中,計數器的上限值有固定的0xFF(8位T/C);0xFF、0x1FF、0x3FF(16位T/C)。或由用戶設定的0x0000-0xFFFF,設定值在16位T/C的ICP或OCRA寄存器中。而比較匹配寄存器的值與計數器上限值之比即為占空比。
二、 PWM應用參考設計
下面給出一個設計示例,在示例中使用PWM方式來產生一個1KHz左右的正弦波,幅度為0-Vcc/2。
首先按照下面的公式建立一個正弦波樣本表,樣本表將一個正弦波周期分為128個點,每點按7位量化(127對應最高幅值Vcc/2):
F(X) = 64 + 63 * Sin(2πx/180) X∈[0…127]
如果在一個正弦波周期中采用128個樣點,那么對應1KHz的正弦波PWM的頻率為128KHz。實際上,按照采樣頻率至少為信號頻率的2倍的取樣定理來計算,PWM的頻率的理論值為2KHz即可。考慮盡量提高PWM的輸出精度,實際設計使用PWM的頻率為16KHz,即一個正弦波周期(1KHz)中輸出16個正弦波樣本值。這意味著在128點的正弦波樣本表中,每隔8點取出一點作為PWM的輸出。
程序中使用ATmega128的8位T/C0,工作模式為相位調整PWM模式輸出,系統時鐘為8MHz,分頻系數為1,其可以產生最高PWM頻率為: 8000000Hz / 510 = 15686Hz。每16次輸出構成一個周期正弦波,正弦波的頻率為980.4Hz。PWM由OC0(PB4)引腳輸出。參考程序如下(ICCAVR)。
//ICC-AVR Application Builder : 2004-08
// Target : M128
// Crystal: 8.0000Mhz
#Include
#Include
#Pragma Data:code
// 128點正弦波樣本表
Const Unsigned Char Auc_SinParam[128] = {
64,67,70,73,76,79,82,85,88,91,94,96,99,102,104,106,109,111,113,115,117,118,120,121,
123,124,125,126,126,127,127,127,127,127,127,127,126,126,125,124,123,121,120,118,
117,115,113,111,109,106,104,102,99,96,94,91,88,85,82,79,76,73,70,67,64,60,57,54,51,48,
45,42,39,36,33,31,28,25,23,21,18,16,14,12,10,9,7,6,4,3,2,1,1,0,0,0,0,0,0,0,1,1,2,3,4,6,
7,9,10,12,14,16,18,21,23,25,28,31,33,36,39,42,45,48,51,54,57,60};
#Pragma Data:data
Unsigned Char X_SW = 8,X_LUT = 0;
#Pragma Interrupt_handler Timer0_ovf_isr:17
Void Timer0_ovf_isr(Void)
{
X_LUT += X_SW; // 新樣點指針
If (X_LUT 》 127) X_LUT -= 128; // 樣點指針調整
OCR0 = Auc_SinParam[X_LUT]; // 取樣點指針到比較匹配寄存器
}
Void Main(Void)
{
DDRB |= 0x10; // PB4(OC0)輸出
TCCR0 = 0x71; // 相位調整PWM模式,分頻系數=1,正向控制OC0
TIMSK = 0x01; // T/C0溢出中斷允許
SEI(); // 使能全局中斷
While(1)
{……};
}
每次計數器溢出中斷的服務中取出一個正弦波的樣點值到比較匹配寄存器中,用于調整下一個PWM的脈沖寬度,這樣在PB4引腳上輸出了按正弦波調制的PWM方波。當PB4的輸出通過一個低通濾波器后,便得到一個980.4Hz的正弦波了。如要得到更精確的1KHz的正弦波,可使用定時/計數器T/C1,選擇工作模式10,設置ICR1=250為計數器的上限值。
五、C51單片機矩陣鍵盤掃描去抖程序
這段有1個C51的項目,用的是新華龍的C51 F020單片機。項目中要使成為事實4*5的矩陣鍵盤。矩陣電路圖如次如示
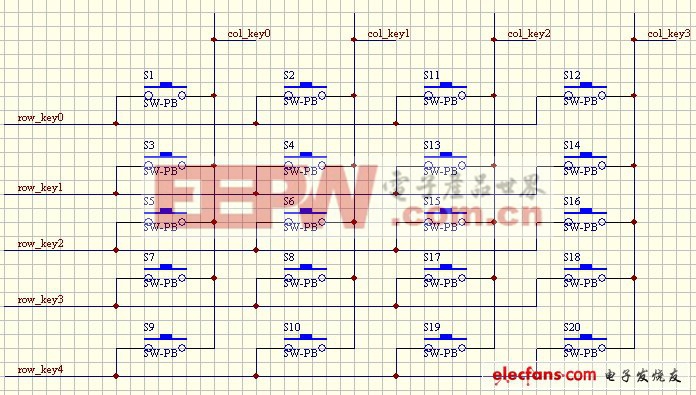
此中,四條列線接在 F020的P2~P5口線上,5條行線接在P5口線上(F020的P5口是差別于平凡C51的擴大接口,不克不及位尋址)。同時4條列線接在一四輸入與非門(74LS20)上,門輸出接F020的外間斷1,如許,不論什么一鍵按下,都會孕育發生間斷,報信程序舉行鍵盤電子掃描。
托1個新手給寫了鍵盤的電子掃描程序,基本功效都能使成為事實,但對鍵盤的去抖措置懲罰老是做欠好,體現是或不克不及去抖,或按鈕相應太卡,或采集到紕繆鍵值。看來新手對矩陣鍵盤電子掃描原理掌握較好(網上資料多),但對鍵盤去抖的知識卻有所欠缺,基本都是按照書上說的延時一段時間再采集鍵值,現實應用中,如許的措置懲罰是遠遠不敷的,過于簡單。現實去抖措置懲罰應該如許舉行更合理一些,即連續采集鍵值,當采集到的鍵值在一段時間內是不異的,即以為按鈕狀況已經穩定,此鍵值為真實鍵值。別的,按鈕開釋時,也會有抖動,導致誤采鍵值,是以在鍵開釋時,也應舉行去抖措置懲罰,措置懲罰要領同時是連續一段時間采集到無鍵按下狀況,才以為按鈕被開釋。按照這個要領,我重寫了新手的程序,現實應用中體現極好。

tcp/ip相關文章:tcp/ip是什么










評論