基于Gene8310的嵌入式家庭服務機器人系統設計

針對家庭服務機器人的任務要求,將機器人控制系統分成以下模塊:嵌入式系統、攝像頭、揚聲器、麥克風、人臉跟蹤系統、語音識別系統、無線通訊系統等。嵌入式系統采用Gene8310微型主板作為硬件平臺,運行Windows操作系統;人臉跟蹤系統、語音識別系統是運行在Windows操作系統下面的基于VC的程序;無線通訊系統是基于Q2501B的GPRS通訊模塊;動作控制是基于PIC16F877A的7自由度伺服電機的控制;行走控制是雙行走輪差動控制的驅動方式。
2.2 動作控制系統設計
家庭服務機器人的動作主要是讓機器人模擬人的手臂關節,以便機器人實現人的一些動作,本論文設計的機器人手臂有三個自由度,分別模擬人體的肩關節、肘關節,可以實現抬臂、彎臂、擺臂等動作,一個手臂三個自由度的組合,可以實現握手、揮手、招手等動作,兩個手臂的組合又可以實現鼓掌、擁抱等人的基本動作。
2.3 行走控制系統設計
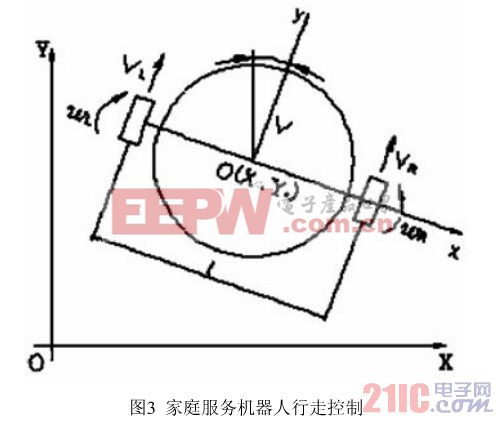
家庭服務機器人行走控制系統采用的是雙行走輪差動控制的驅動方式,機器人的模型如圖3所示。這里我們假定機器人和地面之間是純滾動的,行走輪只旋轉不打滑,得到運動學模型公式:
式中: (x, y)為機器人中心O點的參考坐標;θ為機器人中心O點的運動方向角;ν為機器人中心O點的速度;ω為機器人差動轉向的角速度。
根據上述數學模型,結合機器人的結構特點,把機器人的運動簡化為與地面接觸的兩點運動,兩點的位置決定了機器人的位置,兩點的運動狀態決定了機器人的運動狀態。圖3中XOY為全局坐標系,xoy為機器人坐標系,O為速度瞬心。






評論