基于Simulink的嵌入式網絡化控制仿真實現

反饋通道延時補償
在反饋通道加入帶有接收緩存的預測器,緩存區存放輸入輸出歷史數據和相應時間戳信息。傳感器在一個采樣周期內完成對被控對象的輸出采樣,并通過網絡傳送采樣值,控制信號以及時間戳信息。預測器在采樣周期內,如果沒有收到傳感器從網絡發送的相應時刻的采樣信號,將利用緩存區數據估算采樣信號以供控制器進行控制信號計算。
預測器采用受控自回歸模型ARX對采樣信號進行預測,其模型原型為:
對于模型參數(10)的求解,可在Simulink下根據實驗測得的延時分布特性,選取符合延時分布規律的隨機信號模塊模擬網絡環境,在前向和反饋通道上通過TCP/IP模塊實現控制器到執行器,傳感器到控制器的連接,組成閉合網絡化控制系統仿真框圖,進行離線仿真,收集一系列輸入輸出數據,利用漸消記憶的遞推最小二乘(13)-(15)求出。
仿真實例
本節以一直流無刷電機為例,驗證使用本仿真系統實現網絡化控制實驗的有效性。通過頻率響應法進行電機模型開環辨識,得到被控對象的CARIMA 模型為:
![]()
其中y 表示電機轉速,u 表示控制電壓。
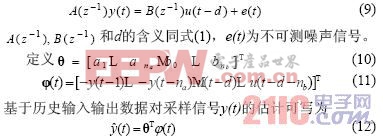
使用Simulink 進行離線仿真,網絡間延時用均勻分布的延時模塊模擬,求得ARX 模型為:

控制算法采用控制時域步長為7 的廣義預測控制,利用Simulink 和仿真系統提供的模塊分別組成圖6 中虛線所包圍的A,B 兩部分,按照上述步驟,將框圖分別下載到位于不同物理空間的硬件平臺運行,控制系統中各節點的數據在該選項卡中設置固定步長和仿真停止時間,選擇積分求解器;單擊Real-Time Workshop 標簽,在該選項卡中設置系統目標文件,模板聯編文件,Make 命令等,在Category 下拉列表中選擇xPC Targetgeneration options 選項,可以設置緩沖區大小,目標對象名字等。
(4)創建和下載目標應用程序。設置完仿真參數,在Simulink 模型窗口中按Ctrl+B,就可以生成C 代碼,并對其編譯、連接生成可執行的目標應用程序,并自動將其下載到目標機上。
(5)控制目標應用程序以及信號跟蹤。目標應用程序下載完成之后,在MATLAB 窗口輸入+tg(或-tg)或者在目標機命令行輸入start(或stop)可以啟動(或停止)目標應用程序。在Simulink 模型中添加xPC Target Scope 模塊,可以在目標機上添加示波器,顯示需要的信號。
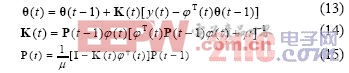
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)







評論