基于Simulink的嵌入式網絡化控制仿真實現

延時特性分析及補償方法
網絡化控制系統的分析和設計比傳統的點對點控制復雜的主要原因在于網絡延時。在采用以太網的分布式網絡化控制系統中,雖然以太網傳輸的實時性隨著快速以太網和交換式以太網技術的發展得到了解決,但由于有限的網絡資源被網絡中的多個節點共享,使控制系統中的實時信息不能及時傳送,加之包交換的網絡間延時的不確定性,嚴重影響了系統的控制性能,甚至造成系統的不穩定。因此,網絡化控制仿真平臺要提供對真實網絡環境的模擬必須首先明確網絡延時的特點。
延時分布特性
往返時間round trip time 簡稱為rtt,是指小數據包從網絡源節點A 發出,經網絡到達目的節點B 后又返回到A 所用的時間。本文在實驗裝置所訪問的廣域網環境下進行rtt測量,以便從測量數據中分析得到延時分布特性。測量使用仿真系統的延時測量模塊。該模塊采用Van Jacobson 提出的高精度測時思想,用Simulink 系統函數實現。
圖4 是在網絡處于正常條件下,實際測得實驗裝置所使用的廣域網的rtt 分布。測量進行了1000 次,其均值為0.3877s,均方差為0.0106s。從頻域角度分析,得到的功率譜密度如圖5 所示。根據帶限白噪聲定義,即功率譜密度函數僅在某些有限頻率范圍內取異于零的常數,為理論分析的簡化,將測得的延時近似為低通白噪聲,這可由低通白噪聲對功率譜密度的定義
![]()
可知。Srinivasagupta 也指出將大多數的網絡延時近似為白噪聲是合理的。
相對于具有較大截止頻率,即時間常數較大,動態響應較慢的系統,由于允許的采樣周期較長,該數量級的網絡延時對控制系統的影響也許可以忽略,但當被控對象為快速響應系統時,網絡延時的數量級很可能等于甚至遠大于控制系統的采樣周期,此時必須對延時進行補償以保證控制系統的穩定。

延時補償方策略
由于延時的不確定性,在網絡化控制中,無法保證在一個采樣周期內恰有相應時刻的信號到來,可能在該采樣周期沒有收據,即空采樣,也可能收到多個收據,即多采樣,還可能收到被延時的數據,即延時采樣。為此,仿真系統對網絡化控制系統的前向和反饋通道的延時分別進行了補償。
信息在網絡間傳輸的格式為:時間戳+對應的數據值。由于仿真系統提供了同步機制模塊,為簡化編程,可在發送時間信息時,只發送相應的周期索引值而非硬時鐘值。圖6 描述了仿真系統采用的網絡延時補償策略。
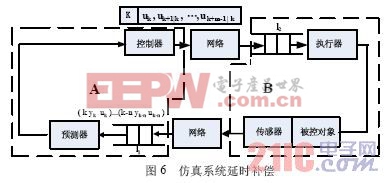
為和傳統的數字控制系統一致,仿真系統中的控制器,傳感器和執行器節點均采用時間驅動方式,即設備工作由時鐘控制,按照一定的周期來執行操作。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)







評論