基于單片機的區域交通信號控制系統

2 系統硬件設計
2.1 車流量信號接口
目前車流量檢測方法量有多種,例如電磁感應法、超聲波檢測法,還有基于機器視覺的檢測方法等。超聲波檢測精度不高,容易受車輛遮擋和行人的影響,檢測的距離短;電磁感應線圈檢測精度高,但要求敷設于路面土木結構中,對路面有損壞,施工和安裝不便。文中假設是使用計算機視覺的方法檢測車流量,于控制器設置8位數字信號輸入端口或模擬信號輸入端口。
2.2 無線通信模塊
由多路口聯合控制的特點可知,采用鋪設通信線纜進行數據通信的方法是不可行的,不但施工不便,而且通信效率低,抗干擾性差。因此采用無線通信方式,不僅能克服以上缺點,而且便于增加和減少路口的數目。通過比較常用無線收發芯片主要參數,綜合考慮其無線傳輸性能之后,文中采用nRF905射頻模塊建立無線通信網絡。
采用通用的單片機STC89C52RC作為主控芯片,nRF905作為無線收發模塊,利用單片機模擬SPI口實現雙向通訊,SPI支持高速數據傳輸,從而滿足了射頻帶寬的要求。nRF905與單片機STC89C52RC的連接方式如圖3所示。本文引用地址:http://www.104case.com/article/171362.htm
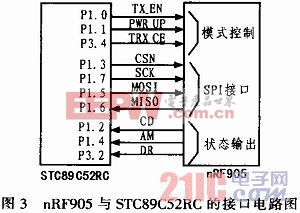
實驗階段使用無增益的PCB天線,射頻模塊設置為最大功率輸出時,通信距離可達100 m左右,實際應用時可采用帶有增益的天線,無線通信距離能夠大大提高,最高可達1 km以上,足以滿足本課題的需要。
2.3 顯示模塊
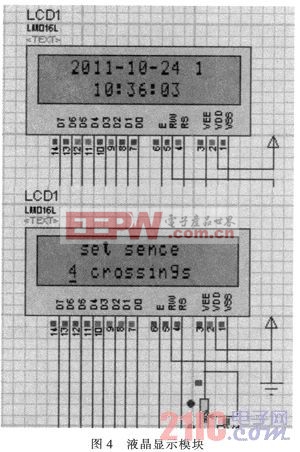
如圖4所示,采用字符液晶顯示器1602作為人機接口,通過1602液晶以及按鍵,我們可以方便地對控制器控制參數進行設定和修改,如實時時鐘設定,路口設定,交通信號燈延時時間設定等。
2.4 時鐘模塊
協調控制的主要目的是實現干線上的綠波控制,減少延誤時間。利用相鄰路口之間的相位差,讓通行車輛盡量遇到較多的綠燈。與單個交叉口控制不同,協調控制要求各路口控制器在相同的時下運行,并且執行完全相同的信號周期。
時鐘模塊采用芯片DS1302,它是美國DALLAS公司推出的實時時鐘芯片,具有功耗低、采用串行通信方式等優點。DS1302為系統提供精準時鐘,在接收和發送數據的同時記下當前的時間,從而實現系統的實時性控制。

單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理









評論