基于MSP430智能小車的設計

3 軟件的設計
MSP430單片機實時監控超聲波模塊傳送的信號并對其信號進行避障決策判斷,小車在不需要做出避障時沿直線行駛或停止,并且等待定時器的中斷信號產生,當需要避障時,小車就向有障礙物相反的方向調整出(左轉、右轉、倒退并轉向)最佳的運行路線,軟件主要采用C語言進行編程。主控程序流程圖如圖4所示。本文引用地址:http://www.104case.com/article/171327.htm
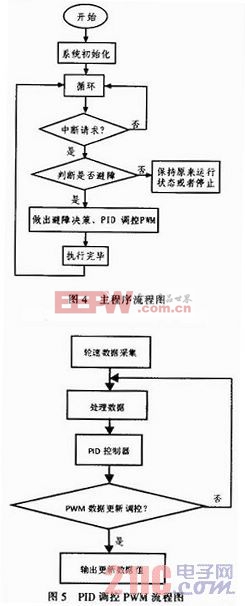
在小車運行的速度調控中加入PID算法來調控PWM對小車的運行速度進行決策控制,能夠很好的實現小車運行的穩定性和可靠性,PID調控PWM的程序流程圖如圖5所示。
4 實驗結果
該智能小車做成后對其性能測試:小車的正常運行速度約為0.11 m/s,在遇到的障礙物后做出的避障決策,跟程序中預先設定避障距離15 cm相差不多,根據試驗的測量數據,小車預先設定的避障距離和實際的情況上下浮動0~3 cm,到達了預期設計的目標。
5 結論
該設計采用的以MSP430單片機為平臺智能小車,能夠滿足控制要求,采用的超聲波避障、PID控制算法以及PWM速度控制,使得小車穩定靈活可靠的運行。后續研究為改進小車實現更高智能化,采用ARM嵌入式、Linux操作系統和DSP,并加入各種智能傳感器等來實現小車的更高的人性化智能化。

pid控制相關文章:pid控制原理
pwm相關文章:pwm是什么
pid控制器相關文章:pid控制器原理
溫濕度控制器相關文章:溫濕度控制器原理










評論