零基礎:學51單片機定時器

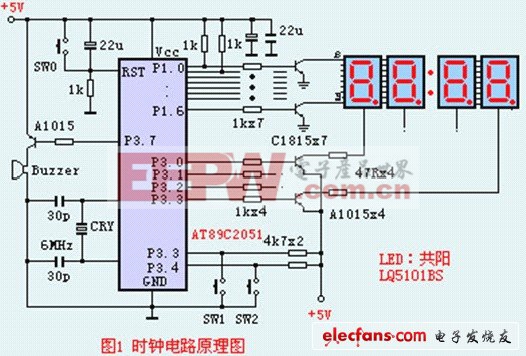
在這里,小編帶你一起從零開始學51單片機定時器。基于單片機的定時器電路原理圖如下所示:
我們學單片機是首先學的就是 led 閃爍,那是用延時程序做的,現在回想起來,這樣做不很恰當,為什么呢?我們的主程序做了燈的閃爍,就不能再干其它的事了,難道單片機只能這樣工作嗎?當然不是,我們能用定時器來實現燈的閃爍的功能。
例 1:查詢方式
ORG 0000H
AJMP START
ORG 30H
START:
MOV P1,#0FFH ;關所 燈
MOV TMOD,#00000001B ;定時/計數器 0 工作于方式 1
MOV TH0,#15H
MOV TL0,#0A0H ;即數 5536
SETB TR0 ;定時/計數器 0 開始運行
LOOP:JBC TF0,NEXT ;如果 TF0 等于 1,則清 TF0 并轉 NEXT 處
AJMP LOOP ;不然跳轉到 LOOP 處運行
NEXT:CPL P1.0
MOV TH0,#15H
MOV TL0,#9FH;重置定時/計數器的初值
AJMP LOOP
END AJMP LOOP
END
鍵入程序,看到了什么?燈在閃爍了,這可是用定時器做的,不再是主程序的循環了。簡單地分析一下程序,為什么用 JBC 呢?TF0 是定時/計數器 0 的溢出標記位,當定時器產生溢出后,該位由 0 變 1,所以查詢該位就可知宇時時間是否已到。該位為 1 后,要用軟件將標記位清 0,以便下一次定時是間到時該位由 0 變 1,所以用了 JBC 指令,該指位在判 1轉移的同時,還將該位清 0。
以上程序是能實現燈的閃爍了,可是主程序除了讓燈閃爍外,還是不能做其他的事啊!不,不對,我們能在 LOOP:……和 AJMP LOOP 指令之間插入一些指令來做其他的事情,只要保證執行這些指令的時間少于定時時間就行了。那我們在用軟件延時程序的時候不是也能用一些指令來替代 DJNZ 嗎?是的,但是那就要求你精確計算所用指令的時間,然后再減去對應的 DJNZ 循環次數,很不方便,而現在只要求所用指令的時間少于定時時間就行,顯然要求低了。當然,這樣的辦法還是不好,所以我們常用以下的辦法來實現。
程序 2:用中斷實現
ORG 0000H
AJMP START
ORG 000BH ;定時器 0 的中斷向量地址
AJMP TIME0 ;跳轉到真正的定時器程序處
ORG 30H
START:
MOV P1,#0FFH ;關所 燈
MOV TMOD,#00000001B ;定時/計數器 0 工作于方式 1
MOV TH0,#15H
MOV TL0,#0A0H ;即數 5536
SETB EA ;開總中斷允許
SETB ET0 ;開定時/計數器 0 允許
SETB TR0 ;定時/計數器 0 開始運行
LOOP: AJMP LOOP ;真正工作時,這里可寫任意程序
TIME0: ;定時器 0 的中斷處理程序
PUSH ACC
PUSH PSW ;將 PSW 和 ACC 推入堆棧保護
CPL P1.0
MOV TH0,#15H
MOV TL0,#0A0H ;重置定時常數
POP PSW
POP ACC
RETI
END
上面的例程中,定時時間一到,TF0 由 0 變 1,就會引發中斷,CPU 將自動轉至 000B處尋找程序并執行,由于留給定時器中斷的空間只有 8 個字節,顯然不足以寫下所有有中斷處理程序,所以在 000B 處安排一條跳轉指令,轉到實際處理中斷的程序處,這樣,中斷程序能寫在任意地方,也能寫任意長度了。進入定時中斷后,首先要保存當前的一些狀態,程序中只 演示了保存存 ACC 和 PSW,實際工作中應該根據需要將可能會改變的單元的值都推入堆棧進行保護(本程序中實際不需保存護任何值,這里只作個演示)。
上面的兩個單片機程序運行后,我們發現燈的閃爍非常快,根本分辨不出來,只是視覺上感到燈有些晃動而已,為什么呢?我們能計算一下,定時器中預置的數是 5536,所以每計 60000 個脈沖就是定時時間到,這 60000 個脈沖的時間是多少呢?我們的晶體震蕩器 是12M,所以就是 60000 微秒,即 60 毫秒,因此速度是非常快的。如果我想實現一個 1S 的定時,該怎么辦呢?在該晶體震蕩器瀕率下,最長的定時也就是 65。536 個毫秒啊!上面給出 一個例程。
ORG 0000H
AJMP START
ORG 000BH ;定時器 0 的中斷向量地址
AJMP TIME0 ;跳轉到真正的定時器程序處
ORG 30H
START:
MOV P1,#0FFH ;關所 燈
MOV 30H,#00H ;軟件計數器預清 0
MOV TMOD,#00000001B ;定時/計數器 0 工作于方式 1
MOV TH0,#3CH
MOV TL0,#0B0H ;即數 15536
SETB EA ;開總中斷允許
SETB ET0 ;開定時/計數器 0 允許
SETB TR0 ;定時/計數器 0 開始運行
LOOP: AJMP LOOP ;真正工作時,這里可寫任意程序
TIME0: ;定時器 0 的中斷處理程序
PUSH ACC
PUSH PSW ;將 PSW 和 ACC 推入堆棧保護
INC 30H
MOV A,30H
CJNE A,#20,T_RET ;30H 單元中的值到了 20 了嗎?
T_L1: CPL P1.0 ;到了,取反 P10
MOV 30H,#0 ;清軟件計數器
T_RET:
MOV TH0,#15H
MOV TL0,#9FH ;重置定時常數
POP PSW
POP ACC
RETI
END
先自己分析一下,看看是怎么實現的?這里采用了軟件計數器的概念,思路是這樣的,先用定時/計數器 0 做一個 50 毫秒的定時器,定時是間到了以后并不是立即取反 P10,而是將軟件計數器中的值加 1,如果軟件計數器計到了 20,就取反 P10,并清掉軟件計數器中的值,不然直接返回,這樣,就變成了 20 次定時中斷才取反一次 P10,因此定時時間就延長了成了 20*50 即 1000 毫秒了。
這個思路在工程中是非常有用的,有的時候我們需要若干個定時器,可 51 中總共才有 2個,怎么辦呢?其實,只要這幾個定時的時間有一定的公約數,我們就能用軟件定時器加以實現,如我要實現 P10 口所接燈按 1S 每次,而 P11 口所接燈按 2S 每次閃爍,怎么實現呢?對了我們用兩個計數器,一個在它計到 20 時,取反 P10,并清零,就如上面所示,另一個計到 40 取反 P11,然后清 0,不就行了嗎?這部份的程序如下
ORG 0000H
AJMP START
ORG 000BH ;定時器 0 的中斷向量地址
AJMP TIME0 ;跳轉到真正的定時器程序處
ORG 30H
START:
MOV P1,#0FFH ;關所 燈
MOV 30H,#00H ;軟件計數器預清 0
MOV TMOD,#00000001B ;定時/計數器 0 工作于方式 1
MOV TH0,#3CH
MOV TL0,#0B0H ;即數 15536
SETB EA ;開總中斷允許
SETB ET0 ;開定時/計數器 0 允許
SETB TR0 ;定時/計數器 0 開始運行
LOOP: AJMP LOOP ;真正工作時,這里可寫任意程序
TIME0: ;定時器 0 的中斷處理程序
PUSH ACC
PUSH PSW ;將 PSW 和 ACC 推入堆棧保護
INC 30H
INC 31H ;兩個計數器都加 1
MOV A,30H
CJNE A,#20,T_NEXT ;30H 單元中的值到了 20 了嗎?
T_L1: CPL P1.0 ;到了,取反 P10
MOV 30H,#0 ;清軟件計數器
T_NEXT:
MOV A,31H
CJNE A,#40,T_RET ;31h 單元中的值到 40 了嗎?
T_L2:
CPL P1.1
MOV 31H,#0 ;到了,取反 P11,清計數器,返回
T_RET:
MOV TH0,#15H
MOV TL0,#9FH ;重置定時常數
POP PSW
POP ACC
RETI
END











評論