基于AT89S52單片機的舵機控制系統設計

控制舵饑關鍵是要產生與角度相對應的PWM信號,單片機通過定時器中斷產生PWM信號。定置,定義TL02和TH02用于PWM信號低電平定時初值設置。例如,舵機初始位置設在90°位置,對應的PWM信號脈寬為1.5ms,即PWM信號高電平為1.5ms,低電平為20ms-1.5ms=18.5ms。所以在程序開始部分如下設置:
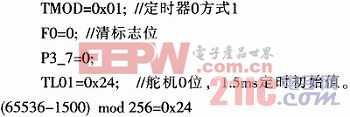
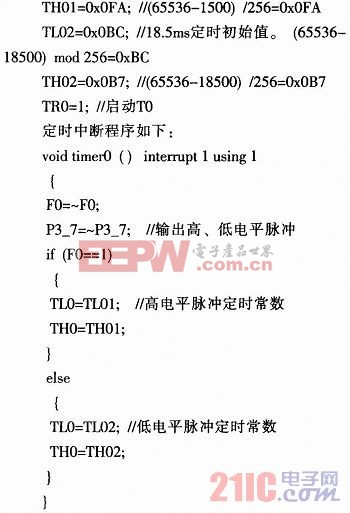
程序如此設置,系統上電后則在P3.7腳產生1.5ms高電平,然后18.5ms低電平,然后不斷重復,舵機則保持在90°位置。如果有按鈕被按下,則舵機按照程序設置角度增加或者減小,實質上是P3.7腳按照程序設置產生了脈寬增加或者減小的PWM信號。
4 結束語
文中設計了一個基于單片機的舵機控制系統,控制方法簡單方便,而且精度比較高。在此控制系統的基礎上,在舵機上安裝受控部件,并增加音樂播放,可做成有聲有色的玩具。本文引用地址:http://www.104case.com/article/170959.htm












評論