DSP用于雷達式生命探測儀的信號處理系統(tǒng)設計

由于TMS820C6711B內(nèi)核可以運行到150 MHz,而外設最高只能運行在100 MHz,故TMS320C6711B的外部時鐘由系統(tǒng)產(chǎn)生從ECLKIN引腳引入,ECLK0UT輸出,而不采用自身的150 MHz兩分頻的ECLKOUT2輸出,從而提高外部存儲器的存取效率。系統(tǒng)電源由外部變壓器提供,變壓器輸出+5 V,經(jīng)過電源調(diào)整芯片產(chǎn)生系統(tǒng)所需要的兩種電壓+3.3 V和+1.8 V。電路采用PT6932(Plug-in Power Modules)方案,PT6932提供雙電源輸出(3.3 V和1.22/1.5 V),其輸出電壓可以由輸出匹配電阻調(diào)整,1.5 v可以升至1.8 V,同時其雙電壓的上電和掉電順序內(nèi)部受控,可以滿足TMS320C6711B的供電順序要求。
內(nèi)存擴展采用2片外圍數(shù)據(jù)存儲器和1片128K×8 b的FLASH,其中數(shù)字存儲芯片選用由兩片4M×16 b寬度SDRAM組成單CE空間32 b寬SDRAM類型,F(xiàn)LASH芯片則選用MBM29LV800TA。
2.3 A/D轉(zhuǎn)換電路
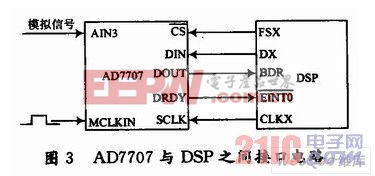
A/D轉(zhuǎn)換采用高分辨率的模數(shù)轉(zhuǎn)換芯片AD7707,由于其外部模擬輸入信號的電壓范圍為±5 V,所以選擇高電壓模擬輸入通道AIN3作為模擬信號輸入端。AD7707的時鐘信號由外圍有源時鐘芯片提供,數(shù)字信號輸入端DIN直接與DSP串行數(shù)據(jù)輸出端DX相連。其數(shù)字信號輸出端DOUT直接與DSP的串行數(shù)據(jù)輸入端BDR相連。串行時鐘信號SCLK直接與DSP的串行口發(fā)送時鐘信號、串行口接收時鐘信號CLKX相連,如圖3所示。
3 系統(tǒng)軟件設計
3.1 系統(tǒng)軟件流程圖
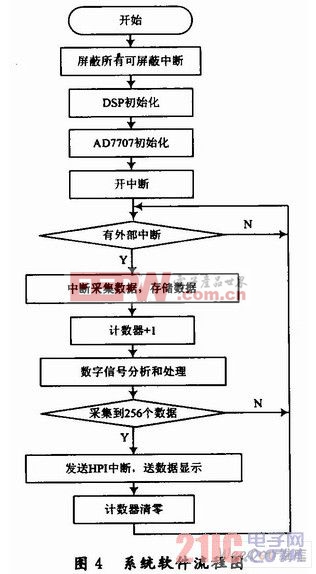
該系統(tǒng)軟件的設計參考雷達波生命參數(shù)檢測系統(tǒng)軟件設計要求,利用TI的綜合開發(fā)調(diào)試軟件CCS完成軟件的編寫調(diào)試。軟件主要完成非接觸生命信號的采集、分析和處理,最后傳送至液晶顯示器進行顯示。軟件的流程如圖4所示,軟件一開始首先屏蔽所有可屏蔽中斷,然后對DSP進行初始化,包括狀態(tài)寄存器、矢量表以及MeBSP串行口的初始化,并對AD7707進行初始化。然后打開中斷,等待外部中斷。在中斷服務程序中讀取經(jīng)過數(shù)模轉(zhuǎn)換后的數(shù)據(jù),并對數(shù)據(jù)進行處理、發(fā)送HPI中斷,讓外部MCU通過HPI接口讀取數(shù)據(jù),顯示輸出。
3.2 初始化
初始化是設定系統(tǒng)工作狀態(tài)的重要步驟,只有正確進行初始化,才能保證芯片的正確運行。系統(tǒng)初始化包括DSP的McBSP初始化和AD7707的初始化兩個部分。
DSP上電復位以后各寄存器都處于一個預先確定的數(shù)值狀態(tài)。上電時刻,系統(tǒng)上電復位,寄存器復位到初試值。McBSP通過3個16位寄存器SPCRl(串行口接收控制寄存器1)、SPCR2(串行口接收控制寄存器2)、PCR(引腳控制寄存器)來配置。接收和發(fā)送操作的各種參數(shù)通過接收和發(fā)送控制寄存器RCRl(接收控制寄存器1)、RCR2(接收控制寄存器2)、XCRl(發(fā)送控制寄存器1)、XCR2(發(fā)送控制寄存器2)。
AD7707的初始化主要是完成各寄存器的初始化。包括設定輸入信號通道、信號采樣頻率、采樣增益、輸入時鐘源等。








評論