工程師STM32單片機(jī)學(xué)習(xí)基礎(chǔ)手記(2):從勉強(qiáng)看懂一行程序到IO口研究

勉勉強(qiáng)強(qiáng)看懂一行程序
繼續(xù)學(xué)習(xí)中,先把開發(fā)板自帶一個(gè)例子做了些精簡(jiǎn),以免看得嚇人。。。。
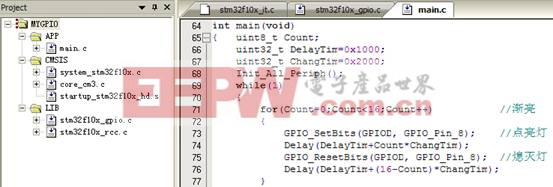
就是這個(gè),讓PORTD上接的4個(gè)LED分別點(diǎn)亮。
開始研究代碼
int main(void)
{
Init_All_Periph();
。。.。。.
看到這一行,開始跟蹤,于是又看到了下面的內(nèi)容
void Init_All_Periph(void)
{
RCC_Configuration();
。。.。。.
繼續(xù)跟蹤
void RCC_Configuration(void)
{
SystemInit();
。。.。。.
這行代碼在system_stm32f10x.c中找到了。
void SystemInit (void)
{
/* Reset the RCC clock configuration to the default reset state(for debug purpose) */
/* Set HSION bit */
RCC-》CR |= (uint32_t)0x00000001;
/* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */
#ifndef STM32F10X_CL
RCC-》CFGR = (uint32_t)0xF8FF0000;
#else
RCC-》CFGR = (uint32_t)0xF0FF0000;
#endif /* STM32F10X_CL */
/* Reset HSEON, CSSON and PLLON bits */
RCC-》CR = (uint32_t)0xFEF6FFFF;
/* Reset HSEBYP bit */
RCC-》CR = (uint32_t)0xFFFBFFFF;
/* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */
RCC-》CFGR = (uint32_t)0xFF80FFFF;
#ifndef STM32F10X_CL
/* Disable all interrupts and clear pending bits */
RCC-》CIR = 0x009F0000;
#else
/* Reset PLL2ON and PLL3ON bits */
RCC-》CR = (uint32_t)0xEBFFFFFF;
/* Disable all interrupts and clear pending bits */
RCC-》CIR = 0x00FF0000;
/* Reset CFGR2 register */
RCC-》CFGR2 = 0x00000000;
#endif /* STM32F10X_CL */
/* Configure the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers */
/* Configure the Flash Latency cycles and enable prefetch buffer */
SetSysClock();
}
這一長(zhǎng)串的又是什么,如何來用呢?看來,偷懶是不成的了,只能回過頭去研究STM32的時(shí)鐘構(gòu)成了。
相當(dāng)?shù)膹?fù)雜。
系統(tǒng)的時(shí)鐘可以有3個(gè)來源:內(nèi)部時(shí)鐘HSI,外部時(shí)鐘HSE,或者PLL(鎖相環(huán)模塊)的輸出。它們由RCC_CFGR寄存器中的SW來選擇。
SW(1:0):系統(tǒng)時(shí)鐘切換
由軟件置’1’或清’0’來選擇系統(tǒng)時(shí)鐘源。 在從停止或待機(jī)模式中返回時(shí)或直接或間接作為系統(tǒng)時(shí)鐘的HSE出現(xiàn)故障時(shí),由硬件強(qiáng)制選擇HSI作為系統(tǒng)時(shí)鐘(如果時(shí)鐘安全系統(tǒng)已經(jīng)啟動(dòng))
00:HSI作為系統(tǒng)時(shí)鐘;
01:HSE作為系統(tǒng)時(shí)鐘;
10:PLL輸出作為系統(tǒng)時(shí)鐘;
11:不可用。
////////////////////////////////////////////////////////////////////
PLL的輸出直接送到USB模塊,經(jīng)過適當(dāng)?shù)姆诸l后得到48M的頻率供USB模塊使用。
系統(tǒng)時(shí)鐘的一路被直接送到I2S模塊;另一路經(jīng)過AHB分頻后送出,送往各個(gè)系統(tǒng),其中直接送往SDI,F(xiàn)MSC,AHB總線;8分頻后作為系統(tǒng)定時(shí)器時(shí)鐘;經(jīng)過APB1分頻分別控制PLK1、定時(shí)器TIM2~TIM7;經(jīng)過APB2分頻分別控制PLK2、定時(shí)器TIM1~TIM8、再經(jīng)分頻控制ADC;
由此可知,STM32F10x芯片的時(shí)鐘比之于51、AVR、PIC等8位機(jī)要復(fù)雜復(fù)多,因此,我們立足于對(duì)著芯片手冊(cè)來解讀程序,力求知道這些程序代碼如何使用,為何這么樣使用,如果自己要改,可以修改哪些部分,以便自己使用時(shí)可以得心應(yīng)手。
單步執(zhí)行,看一看哪些代碼被執(zhí)行了。
/* Reset the RCC clock configuration to the default reset state(for debug purpose) */
/* Set HSION bit */
RCC-》CR |= (uint32_t)0x00000001;

這是RCC_CR寄存器,由圖可見,HSION是其bit 0位。
HSION:內(nèi)部高速時(shí)鐘使能
由軟件置’1’或清零。
當(dāng)從待機(jī)和停止模式返回或用作系統(tǒng)時(shí)鐘的外部4-25MHz時(shí)鐘發(fā)生故障時(shí),該位由硬件置’1’來啟動(dòng)內(nèi)部8MHz的RC振蕩器。當(dāng)內(nèi)部8MHz時(shí)鐘被直接或間接地用作或被選擇將要作為系統(tǒng)時(shí)鐘時(shí),該位不能被清零。
0:內(nèi)部8MHz時(shí)鐘關(guān)閉;
1:內(nèi)部8MHz時(shí)鐘開啟。
///////////////////////////////////////////////////////////////////////
/* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */
#ifndef STM32F10X_CL
RCC-》CFGR = (uint32_t)0xF8FF0000;

這是RCC_CFGR寄存器
該行程序清零了MC0[2:0]這三位,和ADCPRE[1:0],ppre2[2:0],PPRE1[2:0],HPRE[3:0],SWS[1:0]和SW[1:0]這16位。
/*
MCO: 微控制器時(shí)鐘輸出,由軟件置’1’或清零。
0xx:沒有時(shí)鐘輸出;
100:系統(tǒng)時(shí)鐘(SYSCLK)輸出;
101:內(nèi)部8MHz的RC振蕩器時(shí)鐘輸出;
110:外部4-25MHz振蕩器時(shí)鐘輸出;
111:PLL時(shí)鐘2分頻后輸出。
*/
/* Reset HSEON, CSSON and PLLON bits */
RCC-》CR = (uint32_t)0xFEF6FFFF;
清零了PLLON,HSEBYP,HSERDY這3位。
/* Reset HSEBYP bit */
RCC-》CR = (uint32_t)0xFFFBFFFF;
清零了HSEBYP位 ///???為什么不一次寫??
HSEBYP:外部高速時(shí)鐘旁路,在調(diào)試模式下由軟件置’1’或清零來旁路外部晶體振蕩器。只有在外部4-25MHz振蕩器關(guān)閉的情況下,才能寫入該位。
0:外部4-25MHz振蕩器沒有旁路;
1:外部4-25MHz外部晶體振蕩器被旁路。
所以要先清HSEON位,再清該位。
/* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */
RCC-》CFGR = (uint32_t)0xFF80FFFF;
清零了:USBPRE,PLLMUL,PLLXTPR,PLLSRC共7位
/* Disable all interrupts and clear pending bits */
RCC-》CIR = 0x009F0000;
////這個(gè)暫不解讀
SetSysClock();
跟蹤進(jìn)入該函數(shù),可見一連串的條件編譯:
單步運(yùn)行,執(zhí)行的是:
#elif defined SYSCLK_FREQ_72MHz
SetSysClockTo72();
為何執(zhí)行該行呢,找到SYSCLK_PREQ_**的相關(guān)定義,如下圖所示。

這樣就得到了我們所要的一個(gè)結(jié)論:如果要更改系統(tǒng)工作頻率,只需要在這里更改就可以了。
可以繼續(xù)跟蹤進(jìn)入這個(gè)函數(shù)來觀察如何將工作頻率設(shè)定為72MHz的。
static void SetSysClockTo72(void)
{
__IO uint32_t StartUpCounter = 0, HSEStatus = 0;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/
/* Enable HSE */
RCC-》CR |= ((uint32_t)RCC_CR_HSEON);
//開啟HSE
/* Wait till HSE is ready and if Time out is reached exit */
do
{
HSEStatus = RCC-》CR RCC_CR_HSERDY;
StartUpCounter++;
} while((HSEStatus == 0) (StartUpCounter != HSEStartUp_TimeOut));
//等待HSE確實(shí)可用,這有個(gè)標(biāo)志,即RCC_CR寄存器中的HSERDY位(bit 17),這個(gè)等待不會(huì)無限長(zhǎng),有個(gè)超時(shí)策略,即每循環(huán)一次計(jì)數(shù)器加1,如果計(jì)數(shù)的次數(shù)超過HSEStartUp_TimeOut,就退出循環(huán),而這個(gè)HSEStartUp_TimeOut在stm32f10x.h中定義,
#define HSEStartUp_TimeOut ((uint16_t)0x0500) /*!《 Time out for HSE start up */
///////////////////////////////////////////////////////////////////////////////////////////////
if ((RCC-》CR RCC_CR_HSERDY) != RESET)
{
HSEStatus = (uint32_t)0x01;
}
else
{
HSEStatus = (uint32_t)0x00;
}
///再次判斷HSERDY標(biāo)志位,并據(jù)此給HSEStatus變量賦值。
if (HSEStatus == (uint32_t)0x01)
{
/* Enable Prefetch Buffer */
FLASH-》ACR |= FLASH_ACR_PRFTBE;
/* Flash 2 wait state */
FLASH-》ACR = (uint32_t)((uint32_t)~FLASH_ACR_LATENCY);
FLASH-》ACR |= (uint32_t)FLASH_ACR_LATENCY_2;
/* HCLK = SYSCLK */
RCC-》CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1;
//找到定義: #define RCC_CFGR_HPRE_DIV1 ((uint32_t)0x00000000) /*!《 SYSCLK not divided */
/* PCLK2 = HCLK */
RCC-》CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1;
//找到定義:#define RCC_CFGR_PPRE2_DIV1 ((uint32_t)0x00000000) /*!《 HCLK not divided */
/* PCLK1 = HCLK */
RCC-》CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV2;
//找到定義:#define RCC_CFGR_PPRE1_DIV2 ((uint32_t)0x00000400) /*!《 HCLK divided by 2 */
#ifdef STM32F10X_CL
……
#else
/* PLL configuration: PLLCLK = HSE * 9 = 72 MHz */
RCC-》CFGR = (uint32_t)((uint32_t)~(RCC_CFGR_PLLSRC | RCC_CFGR_PLLXTPRE |
RCC_CFGR_PLLMULL));
RCC-》CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_HSE | RCC_CFGR_PLLMULL9);
#endif /* STM32F10X_CL */
//以上是設(shè)定PLL的倍頻系數(shù)為9,也就是說,這個(gè)72M是在外部晶振為8M時(shí)得到的。
/* Enable PLL */
RCC-》CR |= RCC_CR_PLLON;
/* Wait till PLL is ready */
while((RCC-》CR RCC_CR_PLLRDY) == 0)
{
}
/* Select PLL as system clock source */
RCC-》CFGR = (uint32_t)((uint32_t)~(RCC_CFGR_SW));
RCC-》CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
/* Wait till PLL is used as system clock source */
while ((RCC-》CFGR (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08)
{
}
}
else
{ /* If HSE fails to start-up, the application will have wrong clock
configuration. User can add here some code to deal with this error */
/* Go to infinite loop */
while (1)
{
}
}
}
至此,我們可以歸納幾條:
(1) 時(shí)鐘源有3個(gè)
(2) 開機(jī)時(shí)默認(rèn)是HSI起作用,可以配置為所要求的任意一個(gè)時(shí)鐘
(3) 配置時(shí)必須按一定的順序來打開或都關(guān)閉一些位,并且各時(shí)鐘起作用有一定的時(shí)間,因此要利用芯片內(nèi)部的標(biāo)志位來判斷是否可以執(zhí)行下一步。
(4) 如果外部時(shí)鐘、PLL輸出失效,系統(tǒng)可以自動(dòng)回復(fù)到HSI(開啟時(shí)鐘安全系統(tǒng))
(5) HSI的頻率準(zhǔn)確度可以達(dá)到+/- 1%,如果有必要時(shí),還可以用程序來調(diào)整這個(gè)頻率,可調(diào)的范圍大致在200KHz左右。
最后讓我們來感受一下勞動(dòng)的果實(shí)吧--試著改改頻率看有何反應(yīng)。
為查看更改后的效果,先記錄更改前的數(shù)據(jù)。將調(diào)試切換到仿真,在第一條:
Delay(0xAFFFF);
指令執(zhí)行前后,分別記錄下Status和Sec
Status:2507 3606995
Sec:0.00022749 0.05028982
將振蕩頻率更改為36MHz,即
。。.
#define SYSCLK_FREQ_36MHz 36000000 //去掉該行的注釋
/* #define SYSCLK_FREQ_48MHz 48000000 */
/* #define SYSCLK_FREQ_56MHz 56000000 */
/*#define SYSCLK_FREQ_72MHz 72000000*/ //將該行加上注釋
再次運(yùn)行,結(jié)果如下:
Status:2506 3606994
Sec:0.00008478 0.10036276
基本上是延時(shí)時(shí)間長(zhǎng)了一倍。改成硬件仿真,將代碼寫入板子,可以看到LED閃爍的頻率明顯變慢了。
IO研究
前面的例子研究了時(shí)鐘,接下來就來了解一下引腳的情況
Main.c中,有關(guān)I/O口的配置代碼如下:
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure IO connected to LD1, LD2, LD3 and LD4 leds *********************/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, GPIO_InitStructure);
這幾行代碼是將GPIOD的第8,9,10和11引腳配置成輸出,并且還可以設(shè)定輸出引腳的速度(驅(qū)動(dòng)能力?),這里設(shè)定為 50MHz,這應(yīng)該是常用的,還有可以設(shè)置為2MHz的。那么如何將引腳設(shè)置成輸入呢?查看電路原理圖,GPIOD.0~GPIO.4是接一個(gè)搖桿的5個(gè)按鈕的,因此,下面嘗試著將它們?cè)O(shè)置成為輸入端。
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOD, GPIO_InitStructure);
第1行和第3行完全是照抄,第2行那個(gè)GPIO_Mode_IN_FLOATING是在stm32f10x_gpio.h中找到的。
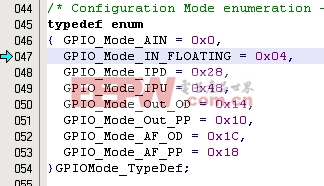
當(dāng)然是因?yàn)檫@里還有GPIO_Mode_Out_PP,所以猜測(cè)應(yīng)該是它了。至于還有其他那么多的符號(hào)就不管了。
定義完成,編譯完全通過,那就接下來準(zhǔn)備完成下面的代碼了。
int main(void)
{
Init_All_Periph();
while(1)
{ if( GPIO_ReadInputDataBit(GPIOD,GPIO_Pin_0)) //1
{ GPIO_ResetBits(GPIOD, GPIO_Pin_8);
}
else
{ /* Turn on LD1 */
GPIO_SetBits(GPIOD, GPIO_Pin_8);
/* Insert delay */
}
。。.。。.
標(biāo)號(hào)為1的行顯然其作用是判斷GPIOD.0引腳是0還是1。這個(gè)函數(shù)是在stm32f10x_gpio.c中找到的。
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
uint8_t bitstatus = 0x00;
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GET_GPIO_PIN(GPIO_Pin));
if ((GPIOx-》IDR GPIO_Pin) != (uint32_t)Bit_RESET)
{
bitstatus = (uint8_t)Bit_SET;
}
else
{
bitstatus = (uint8_t)Bit_RESET;
}
return bitstatus;
}
雖然程序還有很多符號(hào)看不懂(沒有去查),但憑感覺它應(yīng)該是對(duì)某一個(gè)引腳的狀態(tài)進(jìn)行判斷,因?yàn)檫@個(gè)函數(shù)的類型是uint8_t,估計(jì)stm32沒有bit型函數(shù)(需要驗(yàn)證),所以就用了uint8_t型了),如果是讀的端口的值,應(yīng)該用uint16_t型。這一點(diǎn)在下面也可以得到部分的驗(yàn)證:
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx)
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx)
這些函數(shù)是讀引腳及輸出寄存器的數(shù)據(jù)的。
再次編譯,也是順利通過,依法炮制,將其他三個(gè)引腳輸入控制LED的代碼也寫上,為保險(xiǎn)起見,先用軟件仿真,免得反復(fù)擦寫FLASH(順便說一句,目前還沒有搞定將代碼寫入RAM及從RAM中執(zhí)行)
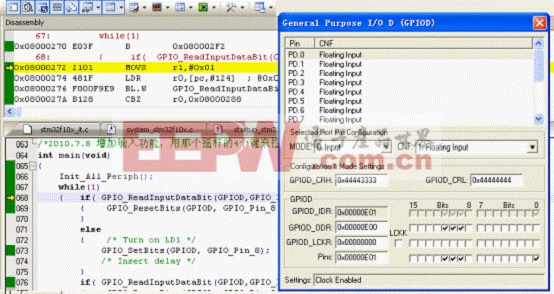
進(jìn)入仿真后打開外圍部件接口,單步執(zhí)行,果然如同設(shè)想那樣運(yùn)作了,單擊Pins 0后面的勾,再次運(yùn)行,果然PIN8后面的勾沒了。做到這里,就感覺到用keil的好處了,這塊熟啊,幾乎沒有花時(shí)間在上面,一用就成了。

單片機(jī)相關(guān)文章:單片機(jī)教程
單片機(jī)相關(guān)文章:單片機(jī)視頻教程
單片機(jī)相關(guān)文章:單片機(jī)工作原理
分頻器相關(guān)文章:分頻器原理 塵埃粒子計(jì)數(shù)器相關(guān)文章:塵埃粒子計(jì)數(shù)器原理 晶振相關(guān)文章:晶振原理 鎖相環(huán)相關(guān)文章:鎖相環(huán)原理










評(píng)論