時差法在檢測液壓系統流量中的應用

1 引言
本文引用地址:http://www.104case.com/article/170708.htm液壓系統一直存在故障率高、故障檢測定位困難的問題。常用的液壓系統振動信號診斷技術、油液分析診斷技術已無法準確獲得反映液壓系統運行狀態的流量、壓力等關鍵參數及其變化;傳統的液壓介入式測量方法,檢測接口有限,拆裝困難,而且影響系統的動態特性。
而流量是液壓系統的重要參數之一,其大小直接反映液壓系統運行狀況的好壞。通過測量系統流量實現液壓系統的實時監控,以保證液壓系統的正常運轉,同時也便于診斷液壓系統故障。因此檢測液壓系統的流量具有重要意義。
2 時差法測液壓流量原理
超聲波用于流體的流速測量有許多優點。和傳統的機械式流量儀表、電磁式流量儀表相比它的計量精度高、對管徑的適應性強、非接觸流體、使用方便、易于數字化管理等等。近年來,由于電子技術的發展,電子元氣件的成本大幅度下降,使得超聲波流量儀表的制造成本大大降低,超聲波流量計也開始普及起來。經常有客戶詢問有關超聲波流量測量方面的問題。作為普及,我們將陸續撰寫一些專題文章,來介紹一些相關知識,以便推廣和普及超聲波流量技術的普及和提高。
時差法的測量原理為:超聲波在流體中的傳播速度與流體流動速度有關,據此可測量流量。在流速v的流動媒質的上、下游分別放置超聲波換能器1和換能器2,結構如圖1所示。
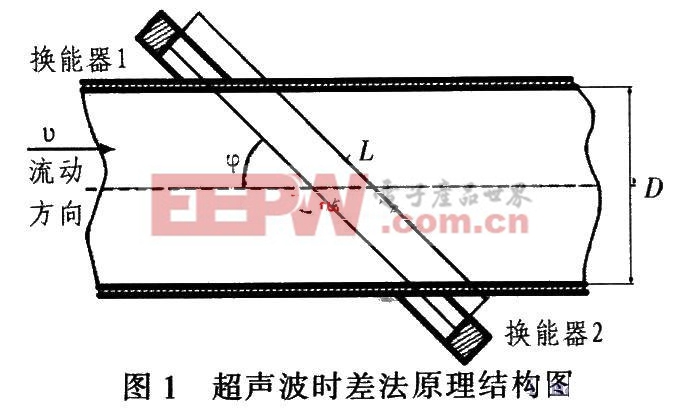
換能器l和換能器2間距為L,管道直徑為D,L與v之間的夾角為θ。當換能器2接收換能器1發送的超聲脈沖時,超聲沿L的傳播速度為(c-v),其中c是靜止媒質中的超聲波速度。超聲波逆流由換能器l傳輸到換能器2的時間為:
將換能器的接發功能調換,換能器2發送超聲脈沖,換能器l接收超聲波順流由換能器2傳輸到換能器1的時間:

于是,逆流和順流的時間差為:

因為超聲波在液體里的傳播速度為1500m/s,而流體速度在不是很高的情況下,可認為:
則式(3)化簡為:

這樣,液體平均流速v就可由聲時差△t確定,即

在c和x恒定的前提下,v與△t成線性。再根據流量方程求出流量Q:

式中k為流速分布修正系數。
3 硬件系統設計
該檢測系統的硬件系統設計主要由超聲波換能器、CPLD功能、驅動發射、接收放大和過零比較等模塊組成。系統工作時,單片機先向CPLD發送指令,CPLD的內部PULSE功能模塊產生600 ns的驅動脈沖,同時CNT功能模塊開始計時:驅動脈沖進入驅動發射電路使超聲波換能器1產生超聲波信號;接收到的信號比較微弱,需通過由LF357和LM318組成的三級接收放大電路對其放大;將放大信號再通過由MAX903組成過零比較電路,從而為CLPD中的CNT功能模塊提供一個停止計時的高電平信號。將CNT中所計時的數據換算為時間,再由換能器2發送,換能器1接收。用CNT記錄另外一組時間數據,二者相減得到順流和逆流的聲時差△t,計算出系統的流速和流量。該檢測系統的關鍵是要得到準確的驅動脈沖和精確的順逆流時間。所以,選用Aher公司CPLD的MAXⅡ系列EMP240T100C5N,并配有100 MHz的晶體振蕩器,CPLD功能模塊是該系統硬件設計的核心。
3.1 CPLD功能模塊
CPLD功能模塊主要由6個子模塊組成,如圖2所示。它們都是利用VHDL語言編寫,各自的功能:DECODER子模塊是將單片機的指令經過解碼傳輸給CPLD內部各個子模塊;CNT子模塊負責計時;PULSE子模塊產生驅動脈沖:CNT_SP子模塊產生CNT的停止計時信號;SEL_2用于選取將CNT中的16位數據的前8位和后8位;TRIBUFFER可將SEL_2選擇的8位數據傳輸給單片機。







評論