基于單片機AT89S52的電動車蹺蹺板設計

1.3.3 黑線檢測方案設計
方案一:可見光發光二極管與光敏二極管組成的發射一接收電路。該方案缺點在于易受外界環境光源的干擾,容易造成誤判,準確度不高。
方案二:脈沖調制的反射式紅外發射-接收器。采用交流分量調制信號減少干擾,但需要控制占空比,要求有較大的電流,在本系統中不可取。
方案三:不調制的反射式紅外發射-接收器。受外界干擾小,靈敏度高。
比較三種方案,方案三的準確度高,明顯優于其他兩種方案,所以選擇方案三。
1.3.4 位置檢測方案設計
方案一:從始端到末端用康銅絲水平置于木板一側,通過采樣檢測電壓值檢測是否已經行駛到蹺蹺板末端B處,此方案要求與車相連,需要一定轉換時間。
方案二:由鼠標工作原理采用光電碼盤測量行駛距離是否已接近板長,或者將板長轉換為接收到的計數脈沖個數,以此檢測電動車是否行駛到末端。
比較兩種方案,方案二簡便可行,測量效果較好,所以選擇方案二。
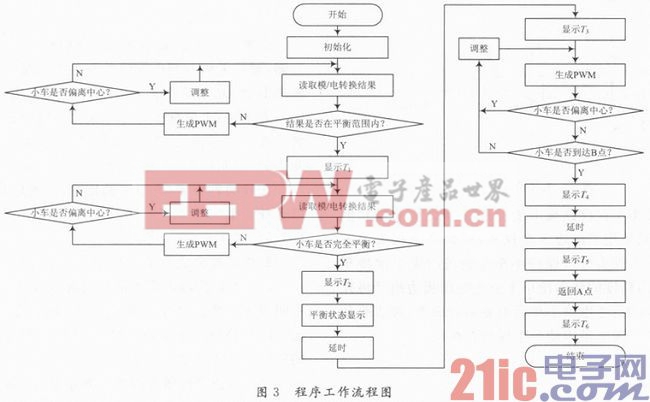
1.3.5 程序設計
程序需要完成以下的功能:
(1)不同階段設定不同的行駛速度,小車在上坡和中間尋求平衡的時候必須要求不同的速度,已達到在規定時間使蹺蹺板平衡,利用軟件檢測和調節使小車在不同階段具有不同的速度。
(2)綜合多傳感器以提高測量精度,確保小車在蹺蹺板上有比較穩定的狀態。
(3)使用軟件濾波器消除小車在行進時的抖動所造成的電壓輸出不穩定的問題。
程序流程如圖3所示。本文引用地址:http://www.104case.com/article/170567.htm
2 測試及誤差分析
2.1 測試方法
測試工具:兩塊秒表(最小精度為0.1 s)、卷尺(最小精度為0.01 m)、數字萬用表(MASTECH MY-65)。

將小車放在蹺蹺板A端,如圖4所示,開啟電源,記錄以下各段時間并觀察平衡指示(以下稱測試條件1);將小車及配重分別放在規定范圍內的任意位置,重復上述工作(以下稱測試條件2)。其中T1表示小車從A點到中點C的時間;T2表示小車找平衡的時間;T3表示小車的平衡保持時間;T4表示小車從平衡點到蹺蹺板末端B的時間;T5表示小車在B點停留的時間(測試條件1),表示第二次增加配重保持平衡的時間(測試
條件2);T6表示小車從B點返回A點的時間;T7表示小車總行程的時間。
2.2 誤差分析
(1)蹺蹺板所處位置可能不水平,給測量角度帶來偏差,可以使用其他水平測試儀檢測位置是否水平。
(2)由于電動車運動產生一定的振蕩導致所測角度有一定偏差,可以將電動車座板牢固焊接在車體上或者將角度傳感器安裝在蹺蹺板上。
(3)蹺蹺板板面不夠粗糙,摩擦力不夠大,會使電動車產生一定的滑動,將板面用摩擦系數比較大的紙張貼在上面增大摩擦力。
3 結論
本文采用角度傳感器直接測量系統角度的變化完成小車的平衡檢測,PWM技術控制的步進電動機作為主驅動電機,使小車可以穩定準確地達到平衡及通過蹺蹺板。通過多次測試實驗,系統達到了設計的要求,可以很好地完成任務。





評論