基于單片機(jī)AT89S52的電動車蹺蹺板設(shè)計

摘要:該文通過采用AT89S52作為控制核心,設(shè)計了整個電動車蹺蹺板系統(tǒng)。系統(tǒng)的硬件部分主要包括:電機(jī)驅(qū)動模塊、步進(jìn)電動機(jī)、平衡檢測模塊、光電檢測模塊、液晶顯示模塊以及紅外遙控模塊;軟件部分則采用高效的C語言編寫實現(xiàn)了平衡檢測和校正功能。總體來說,系統(tǒng)的設(shè)計符合要求,可以在規(guī)定的時間內(nèi)達(dá)到平衡狀態(tài)。
關(guān)鍵詞:電動車蹺蹺板;AT89S52;平衡檢測;角度傳感器
0 引言
本系統(tǒng)設(shè)計要解決的電動車蹺蹺板問題,要求電動車能夠在規(guī)定時間內(nèi)到達(dá)蹺蹺板的中心點C處,并保持平衡,隨后電動車到達(dá)蹺蹺板的末端B處,停留之后返回始端A處。另外,如果將蹺蹺板重新配重,則要求電動車在規(guī)定范圍內(nèi)駛上蹺蹺板,同時,在規(guī)定時間內(nèi)也能實現(xiàn)平衡,如果再加一塊重物之后蹺蹺板重新達(dá)到平衡。
1 系統(tǒng)設(shè)計
1.1 總體設(shè)計
本系統(tǒng)采用單片機(jī)作為控制系統(tǒng)的主模塊,實現(xiàn)系統(tǒng)控制與信號檢測,系統(tǒng)的總體框圖如圖1所示。主要包括單片機(jī)模塊、電機(jī)驅(qū)動模塊、步進(jìn)電動機(jī)、平衡檢測模塊、光電檢測模塊、液晶顯示模塊以及紅外遙控模塊。

系統(tǒng)通過平衡檢測來判斷電動車是否處于平衡狀態(tài),使電動車停留在C處附近,采用光電檢測模塊使電動車行駛至B處停止,采用尋黑線方法使電動車直線前行以及由末端B處能夠直線后退到始端A處。紅外遙控啟動系統(tǒng),液晶顯示各階段用時以及溫度時間。在配重情況下通過黑線檢測的方法使電動車在規(guī)定區(qū)域內(nèi)的任意指定位置順利駛上蹺蹺板。此方案用平衡檢測模塊實現(xiàn)系統(tǒng)平衡,用尋黑線調(diào)整車身與蹺蹺板同向,總體設(shè)計完全達(dá)到題目要求,可行性很高。
1.2 硬件選型
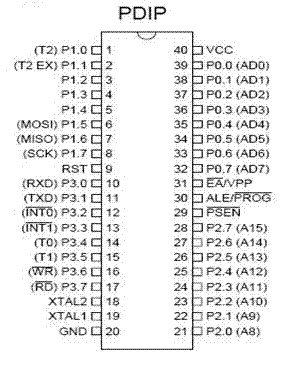
通過比較并結(jié)合自身優(yōu)勢最終選擇AT89S52單片機(jī)作為本系統(tǒng)的核心部分。該款單片機(jī)與MCS51系列完全兼容,易于開發(fā)調(diào)試。其片內(nèi)帶有FLASH存儲器且可在線下載程序,片上各種資源完全能滿足本系統(tǒng)的要求。
本方案中選用普通反射式紅外光電開關(guān)來檢測蹺蹺板上黑線。在沒有探測到黑線時,探頭輸出始終保持低電平。當(dāng)檢測到黑線時,輸出立刻由低電平跳變到高電平。紅外光電開關(guān)送來的信號經(jīng)放大整形后送單片機(jī)分析處理,如圖2所示。
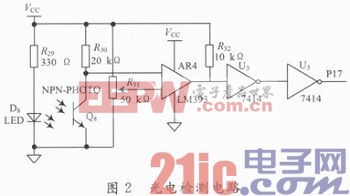
為保證小車在蹺蹺板上能嚴(yán)格地沿黑線前進(jìn)和倒退,本方案共采用了前邊8個探頭,后面2個探頭的方案。前邊8個探頭可以保持小車在前進(jìn)時完全保持車身在板內(nèi),高精度的轉(zhuǎn)向使小車前進(jìn)時距板邊沿嚴(yán)格控制在4 cm以內(nèi);考慮到小車后退要求較簡單,經(jīng)實驗和檢測后邊2個探頭足以使小車保持在板內(nèi)。
1.3 軟件設(shè)計
1.3.1 平衡檢測模塊方案設(shè)計
方案一:采用角度傳感器直接測量系統(tǒng)角度的變化,當(dāng)角度變化不超過所定范圍即認(rèn)為達(dá)到平衡。角度測量精確,靈敏度高,實時性強(qiáng),構(gòu)造簡單。
方案二:置一裝有適量水的小水罐于車上,當(dāng)上坡時水體傾斜,當(dāng)達(dá)到平衡狀態(tài)時水體幾乎水平,利用液位傳感器檢測液面高度實現(xiàn)系統(tǒng)平衡。此方案可行,但會增加電動車載重,靈敏度不是很高,要求液體不出現(xiàn)振蕩。
比較兩種方案,方案一具有明顯優(yōu)點,所以選擇方案一。
1.3.2 驅(qū)動電機(jī)方案設(shè)計
方案一:直流電機(jī),即采用H型PWM驅(qū)動電路驅(qū)動直流電機(jī),改變電機(jī)電壓極性實現(xiàn)正反轉(zhuǎn),PWM占空比控制轉(zhuǎn)速,由于電壓難達(dá)到很高的精度,其轉(zhuǎn)速也達(dá)不到本系統(tǒng)的精度。
方案二:步進(jìn)電機(jī),按照接收脈沖數(shù)控制其步數(shù),按照給定步進(jìn)電機(jī)的步序和步數(shù)直接控制步進(jìn)電機(jī)的運動,可以提高精確性,適合平衡狀態(tài)及位置檢測。
比較兩種方案,選擇方案二。





評論