EPS電動助力轉向系統的軟硬件設計

保護電路
本文引用地址:http://www.104case.com/article/170165.htm保護電路是以可重觸發的單穩態觸發器設計而成,此電路有兩種狀態,穩態和暫穩態。對于可重觸發型單穩態器件,當電路的暫穩態還沒有結束之前,再來一次觸發信號作用后,電路將對這個新的觸發信號進行響應,還要再延遲一個暫穩態時間,電路才能返回穩態,此暫穩態時間由邏輯符號中的CX、RX/CX是外接阻容元件決定。圖中D1A、D2B的第1、9腳為脈沖觸發端,Q端為暫穩態輸出端,其高電平為暫穩態。我們利用這個特性進行H橋的得電保護設計。
發動機轉速脈沖、看門狗脈沖、傳感器信號電平是EPS正常工作的三個重要條件,只要其中任何一個條件不滿足,EPS的H橋驅動將不能正常得電。我們把轉速脈沖和看門狗脈沖作為觸發器的觸發信號。車子啟動和EPS的程序正常正是由這個條件來判斷的。只要這個脈沖不消失,單穩態器件D1的輸出永遠是暫穩態高電平,也直接影響到U1A三個輸入條件的建立。
圖中U1A的三個輸入端同時為高電平時,即三個條件同時成立,經過D2A反相變高驅動V5導通,使用H橋電源繼電器閉合,H橋得電而正常工作。但是如果U1A的三個輸入端條件只要有一個不正常,那么H橋失電而不能正常工作,從而起到斷電保護的作用。
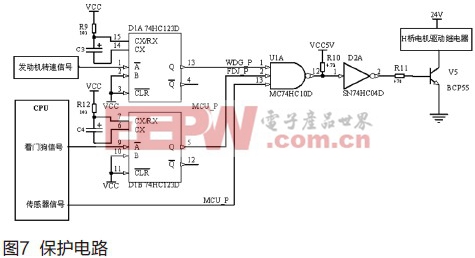
發動機轉速脈沖是汽車正常運轉工作標志之一,傳感器信號電平是扭矩傳感器正常工作的狀態標志,看門狗脈沖是EPS主程序正常運行的標志,發動機轉速脈沖、看門狗脈沖與D1A與D1B兩個單穩態觸發器相連,只要此脈沖不消失,則單穩態觸發器D1A與D1B輸出為高電平,如果傳感器信號電平也為高電平時,那么U1A輸出低電平信號經D2A反相變高后可驅動繼電器閉合。反之則關閉。以上工作原理為EPS的斷電保護機制。
各單元電路的綜合理解
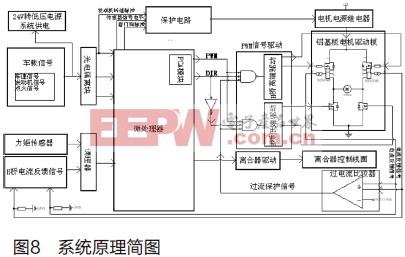
以上詳細介紹了各單元電路的工作原理及電路,把圖1電路簡化后得到各電路間的簡圖,如圖8所示,分析理解他們之間的聯系:
(1)主進程:轉向助力的產生與調節,力矩傳感器信號與車載信號通過調理后進入微處理器內部,經過微處理器內部量化,供程序算法使用,CPU獲得這些外部參數,執行EPS控制算法輸出PWM信號,經過驅動后加載到H橋的高低邊功率管上,以驅動EPS電機產生助力。
(2)保護進程:保護電路收集到EPS控制器工作的必要外部條件,如果這些條件都滿足,保護電路會驅動電機電源繼電器閉合,以使鋁基板電機驅動板得電工作,反之將不能正常工作,主進程也會停止,EPS不產生助力。
(3)反饋進程:電流反饋進程有兩個作用,處理如下:
一路經過比較器輸出,輸出電平用于控制PWM信號的輸出,從圖8中我們可以看出PWM信號驅動上,有一個3輸入與門用于控制PWM的輸出,比較器的過流保護信號就是其中輸入條件之一,只要電機過流,比較器就會產生一低電平使3輸入與門關閉,也就關閉了PWM輸出。
另外一路經過調理器后進入微處理器內進行量化,以供微處器執行相應程序保護。
程序設計
固件程序采用C51語言進行設計,采用模塊化設計思想,主要子程序包括:扭矩傳感器的力矩與角度信號的提取算法、車速信號和發動機信號的測量程序、助力調節控制算法、保護電路的控制算法、設備的初始化定義、中斷程序等。

DIY機械鍵盤相關社區:機械鍵盤DIY
模擬信號相關文章:什么是模擬信號
模數轉換器相關文章:模數轉換器工作原理










評論