光電跟蹤伺服系統中模糊控制器的設計與仿真

四、結果分析:
經過仿真,得到常規控制器階躍響應曲線(圖三)和帶有二維模糊控制控制器的光電跟蹤伺服系統(圖四、圖五)的階躍響應曲線如下:本文引用地址:http://www.104case.com/article/169473.htm
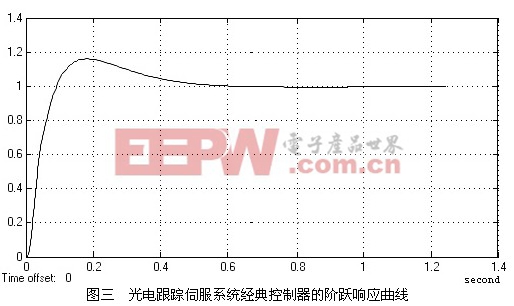
Fig.3 step response of classic control of opto-electronic tracking
servo system
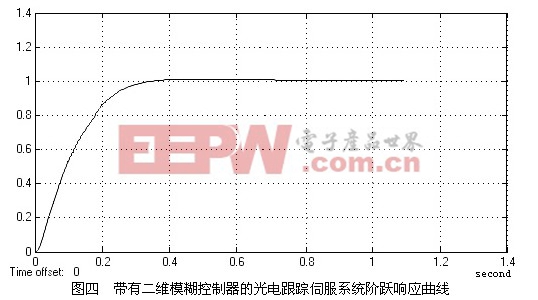
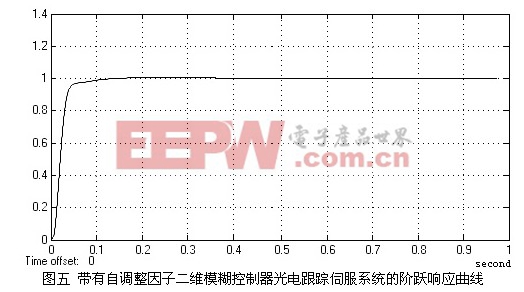
Fig.5 step response of opto-electronic tracking servo system with
self-tuning two-dimension fuzzy control
對比帶有自調整因子的二維模糊控制器光電跟蹤伺服系統(圖五)、經典控制器和一般二維模糊控制器的階躍響應曲線(如圖三,圖四)可以得出,自調整因子二維模糊控制器和經典控制器(它的超調較大、高于15%,調節時間以達到±5%為準大于0.4秒)和一般二維模糊控制器(它的超調為1.2%,調節時間以達到+-5%為準,約0.3秒)相比,它的超調量較小,為0.6%,調節時間以達到±5%為準,為0.04秒,仿真表明加入比例因子自調整二維模糊控制器的光電跟蹤伺服系統具有更好的動態性能。
本文作者創新點:
本文中特別采用S-函數將光電跟蹤伺服系統中兩種控制器之間的切換和模糊控制器比例因子自調整集于一身,并通過同時對Ke、Kec、Ku三個二維模糊控制器因子的自調整改善了光電跟蹤伺服系統的動態性能。










評論