基于單片機的模擬路燈控制系統設計方案

圖6 紅外收發傳感器判斷交通情況原理框圖及紅外接收發射電路。
2.4 環境明暗變化檢測與故障檢測電路
采用光敏電阻實現對其明暗的變化,產生不同的電壓,經單片機內部模數轉換處理,根據檢測的信號進行相應的處理,實現因環境變化而改變LED 燈的開關狀態。其原理圖如圖7 所示。
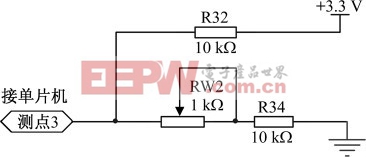
圖7 環境明暗變化檢測與故障檢測電路。
3 系統軟件設計
系統的軟件采用C 語言編程,軟件開發采用新華龍Silicon Laboratories IDE 軟件平臺進行調試。為了編寫和調試的方便,節省資源,程序使用模塊化設計,根據各功能要求分別設計程序,大大簡化了程序的設計和調試工作,節省設計周期。
3.1 系統主程序
主程序開始工作在一個等待設定狀態,當有鍵按下時系統根據按鍵模式工作。本系統采用紅外遙控控制,利用定時器中斷來實現對其解碼。程序根據設定的模式工作,當遇到特殊情況會自動控制路燈的開關狀態。主程序流程圖如圖8 所示。
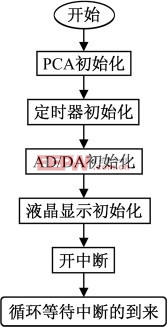
圖8 主程序流程圖。
3.2 功率調節子程序
功率調節子程序流程圖如圖9 所示。程序首先通過PID 算法比較判斷檢測值的大小是否到20%,如果不夠,時鐘信號加1,同時修改PWM 控制電壓輸出。
若時鐘信號不加1,就要考慮是否需要手動調節功率。
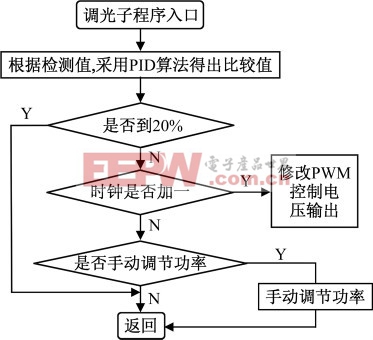
圖9 功率調節子程序流程圖。
4 系統測試
4.1 開關控制功能測量
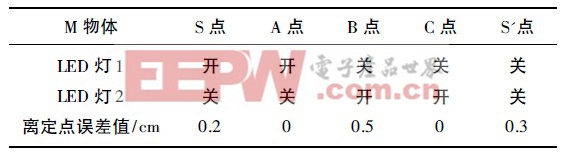
( 1) 交通情況自動調節測試。
交通情況自動調節測試如表1 所示。測試結果表明能自動調節LED 燈1 及LED 燈2 的開關,且可移動物體M 上定位點與過亮燈狀態變換點( S、B、S' 等點) 垂線間的距離≤2 cm.
表1 交通情況自動調節測試。
( 2) 開關燈定時測試。
設定LED 燈1 及LED 燈2 同時開( 17: 00) ,LED燈1 及LED 燈2 同時關( 17: 10) ; 設定LED 燈1 及LED 燈2 分別在不同時間開關( LED 燈1 于18: 00 開,LED 燈2 于18: 10 開; LED 燈1 于9: 00 關,LED 燈2于9: 10 關) .開關燈定時測試如表2 所示。
表2 開關燈定時測試

上表可見系統存在誤差,誤差產生是由于電路本身時鐘有誤差,還有人為的讀數誤差。
( 3) 環境明暗變化自動開關燈測試。
明暗變化自動開關燈測試,測試結果表明: 當環境變暗時,自動開啟燈,當環境變亮時,自動關燈。
4.2 恒流源輸出功率測試
表3 是在恒流源帶LED 負載,調節控制電壓時的實測電流值。
表3 LED 燈恒流驅動電路測試數據
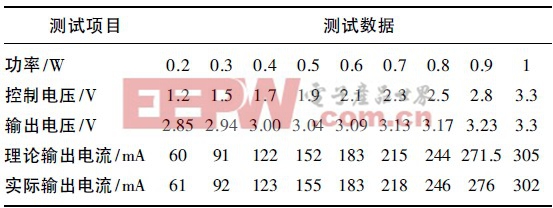
從測試結果可以看出,電流源的恒流精度達到了98.7%,輸出功率精度變化小于2%,基本技術指標達到設計要求。
5 結論
通過綜合測試,本模擬路燈控制系統實現了自主設定顯示開關燈時間,控制整條支路按時開燈和關燈,并根據環境明暗的變化及交通情況自動控制調節燈的亮度和開關; 當路燈出現故障時,支路控制器發出滴答的報警信號,并顯示有故障燈的編號。整個系統完全自給自足,使用外圍器件少,軟件編程方便靈活,系統調試簡單方便,系統成本低,性價比高,具有較高的現實意義。
分頻器相關文章:分頻器原理 光電開關相關文章:光電開關原理









評論