基于虛擬現(xiàn)實(shí)的網(wǎng)絡(luò)化上肢康復(fù)訓(xùn)練系統(tǒng)

現(xiàn)階段,在國(guó)內(nèi)的康復(fù)治療中,針對(duì)患者功能訓(xùn)練的治療仍舊以治療師的手法操作為主,或輔助一些簡(jiǎn)單的訓(xùn)練器械,且訓(xùn)練過(guò)程單調(diào)無(wú)趣,患者容易產(chǎn)生厭煩情緒。治療師不容易即時(shí)了解病人的訓(xùn)練程度和效果 [1][2]。研究表明,如果能夠在訓(xùn)練過(guò)程中提供多種形式的信息反饋,充分發(fā)揮患者的主觀能動(dòng)性,將會(huì)使康復(fù)訓(xùn)練效果得到很大提高。虛擬現(xiàn)實(shí)是一種新興的并且迅速發(fā)展的技術(shù),它的主要特點(diǎn)是:利用計(jì)算機(jī)和傳感技術(shù)生成一個(gè)具有多種感官刺激的虛擬境界,這種虛擬境界可以使人產(chǎn)生一種身臨其境的感覺(jué);人能以自然的方式與虛擬境界中的對(duì)象進(jìn)行交互[3]。將虛擬現(xiàn)實(shí)技術(shù)應(yīng)用到康復(fù)醫(yī)療領(lǐng)域,可以有效的解決現(xiàn)有的康復(fù)醫(yī)療方法的局限性[4]。
康復(fù)機(jī)器人技術(shù)在歐美等國(guó)家己經(jīng)得到了科研工作者和醫(yī)療機(jī)構(gòu)的普遍重視 ,也取得了一些有價(jià)值的成果. 06年 Tobias Nef等人研制了基于虛擬現(xiàn)實(shí)技術(shù)的上肢康復(fù)醫(yī)療機(jī)器人 ARMIn[5]。Rutgers大學(xué)和 Stanford醫(yī)學(xué)院在基于虛擬環(huán)境的遠(yuǎn)程康復(fù)機(jī)器人系統(tǒng)方面做了大量的工作[6]。清華大學(xué)研制了一種上肢康復(fù)設(shè)備 UECM,可以在平面內(nèi)進(jìn)行兩個(gè)自由度的運(yùn)行訓(xùn)練[1]。
本文針對(duì)實(shí)驗(yàn)室現(xiàn)有的一種上肢康復(fù)訓(xùn)練機(jī)器人系統(tǒng)設(shè)計(jì)開(kāi)發(fā)了虛擬現(xiàn)實(shí)的輔助康復(fù)訓(xùn)練系統(tǒng),以激發(fā)患者進(jìn)行康復(fù)訓(xùn)練的興趣和動(dòng)力,達(dá)到提高康復(fù)訓(xùn)練效果的目的。
1.系統(tǒng)總體概況
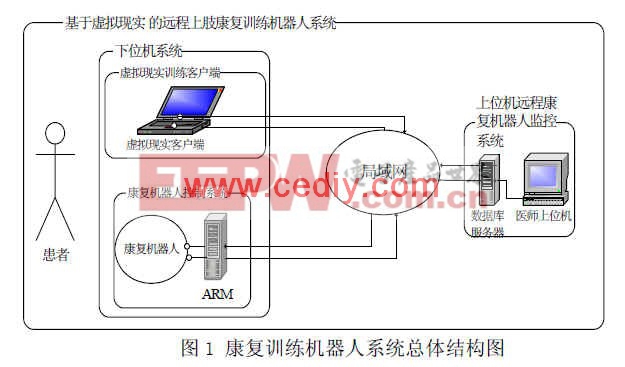
1.1 康復(fù)訓(xùn)練機(jī)器人系統(tǒng)總體結(jié)構(gòu)圖康復(fù)訓(xùn)練機(jī)器人系統(tǒng)主要可分為上位機(jī)遠(yuǎn)程監(jiān)控系統(tǒng)和下位機(jī)系統(tǒng)。 系統(tǒng)整體結(jié)構(gòu)圖如圖 1所示。
1.2 康復(fù)機(jī)器人機(jī)構(gòu)設(shè)計(jì)
康復(fù)機(jī)器人機(jī)構(gòu)部分主要有座椅部分、支撐部分、牽引部分組成,如圖 2所示。訓(xùn)練時(shí),病人坐在椅子上,通過(guò)懸吊線和肘關(guān)節(jié)支撐套將病人的手臂吊起,病人的手被固定在康復(fù)訓(xùn)練牽引機(jī)械臂的托盤(pán)上。
1.3康復(fù)機(jī)器人系統(tǒng)工作原理
該康復(fù)訓(xùn)練系統(tǒng)由 4部分組成:基于虛擬現(xiàn)實(shí)技術(shù)的輔助訓(xùn)練客戶端,康復(fù)機(jī)器人控制系統(tǒng)(下位機(jī)) ,醫(yī)生端監(jiān)控計(jì)算機(jī)(上位機(jī)),和網(wǎng)絡(luò)通訊部分。其中康復(fù)機(jī)器人控制系統(tǒng)由 ARM主控模塊、測(cè)量控制電路、鍵盤(pán)及 LCD顯示電路、存儲(chǔ)器件等主要部分組成。被動(dòng)訓(xùn)練模式運(yùn)行時(shí),安裝在康復(fù)訓(xùn)練牽引機(jī)械臂的力和位置傳感器將采集的病人運(yùn)動(dòng)的力和位置信號(hào)經(jīng)過(guò)信號(hào)處理后送給 ARM主控模塊,主控模塊經(jīng)過(guò)預(yù)處理后再通過(guò)下位機(jī)網(wǎng)絡(luò)模塊把力和位置信息通過(guò)局域網(wǎng)傳送給醫(yī)生端監(jiān)控主機(jī),同時(shí)監(jiān)控軟件繪制出力度信號(hào)和位置信號(hào)的實(shí)時(shí)曲線,并訪問(wèn)后臺(tái)病案數(shù)據(jù)庫(kù),實(shí)時(shí)記錄訓(xùn)練各項(xiàng)狀態(tài)參數(shù)。醫(yī)生根據(jù)反饋的信息判斷病人的康復(fù)情況,并通過(guò)上位機(jī)設(shè)置康復(fù)訓(xùn)練參數(shù),發(fā)送控制指令給下位機(jī),下位機(jī)根據(jù)醫(yī)生設(shè)置的參數(shù),采用相應(yīng)的控制算法,發(fā)送控制信號(hào),經(jīng)驅(qū)動(dòng)電路放大后驅(qū)動(dòng)電機(jī),從而控制康復(fù)訓(xùn)練牽引機(jī)械臂的運(yùn)動(dòng)。主動(dòng)模式和阻抗模式運(yùn)行時(shí),虛擬現(xiàn)實(shí)訓(xùn)練客戶端軟件和上位機(jī)遠(yuǎn)程監(jiān)控軟件同時(shí)通過(guò)局域網(wǎng)連接至下位機(jī) ARM嵌入式康復(fù)機(jī)器人主控模塊,主控模塊把采集到的力度和位置信號(hào)經(jīng)過(guò)預(yù)處理后,同時(shí)發(fā)送給上位機(jī)監(jiān)控程序和虛擬現(xiàn)實(shí)訓(xùn)練程序。虛擬現(xiàn)實(shí)輔助訓(xùn)練軟件利用接收到的網(wǎng)絡(luò)數(shù)據(jù)通過(guò)相應(yīng)算法轉(zhuǎn)化為虛擬場(chǎng)景中物體的坐標(biāo),同時(shí)配合設(shè)置好的虛擬場(chǎng)景和人機(jī)交互策略實(shí)現(xiàn)虛擬現(xiàn)實(shí)輔助康復(fù)訓(xùn)練過(guò)程。本文分別使用 windows GDI 和 OpenGL+3dmax 設(shè)計(jì)了兩套虛擬現(xiàn)實(shí)康復(fù)訓(xùn)練程序,分別配合主動(dòng)訓(xùn)練模式和阻抗訓(xùn)練模式。
2、虛擬現(xiàn)實(shí)輔助康復(fù)訓(xùn)練客戶端軟件開(kāi)發(fā)
康復(fù)病人由于肢體肌肉處于廢退狀態(tài),很容易對(duì)鍛煉感到厭煩,這對(duì)于病人的康復(fù)進(jìn)程是很不利的。為此本文利用 Windows GDI,OpenGL+3Dmax設(shè)計(jì)了兩個(gè)具有良好交互性的游戲程序作為患者輔助康復(fù)訓(xùn)練平臺(tái),使患者在游戲過(guò)程中不知不覺(jué)的完成鍛煉,變?cè)瓉?lái)的消極鍛煉為積極主動(dòng)的參與鍛煉。
2.1配合阻抗訓(xùn)練模式的虛擬現(xiàn)實(shí)輔助訓(xùn)練軟件設(shè)計(jì)
2.1.1 阻抗訓(xùn)練模式介紹
該訓(xùn)練模式適用于即將康復(fù)的患者,這類(lèi)患者的患肢已經(jīng)逐步恢復(fù)運(yùn)動(dòng)能力,這時(shí)就可以根據(jù)患者的康復(fù)情況,在康復(fù)鍛煉過(guò)程中通過(guò)機(jī)器人給患者的患肢作用一定大小的阻尼力,使患者完成動(dòng)作的時(shí)候克服阻力,從而增強(qiáng)肌肉的力量,逐步恢復(fù)到正常狀態(tài)。
2.1.2 程序設(shè)計(jì)
該軟件采用 VC++6.0創(chuàng)建的基于單文檔的 MFC應(yīng)用程序。游戲開(kāi)始后病人通過(guò)控制機(jī)械臂的水平運(yùn)動(dòng),控制虛擬場(chǎng)景中水平擋板的移動(dòng)反彈小球,擊打上畫(huà)面上方的矩形磚塊。如圖 3所示。程序開(kāi)始運(yùn)行后,通過(guò) GDI繪制出彈球游戲的基本場(chǎng)景,小球和水平移動(dòng)擋板,完成游戲參數(shù)的基本初始化工作。在創(chuàng)建框架窗體的同時(shí)使用 CAsyncSocket類(lèi)的 MySocket派生類(lèi),初始化訓(xùn)練客戶端套接字,封裝了網(wǎng)絡(luò)通信消息響應(yīng)函數(shù)。并重載了其中的 OnReceive(), OnAccept(),OnConnect(),OnClose()等消息響應(yīng)函數(shù),這些函數(shù)分別映射 CMyView類(lèi)中相應(yīng)的處理函數(shù)。完成套接字初始化后,立即與下位機(jī)服務(wù)器連接,并開(kāi)始接收下位機(jī)傳送的位置和力度數(shù)據(jù)。當(dāng)有網(wǎng)絡(luò)數(shù)據(jù)到達(dá)時(shí),程序映射調(diào)用 CMyView類(lèi)中的 OnReceive()函數(shù),完成接收下位機(jī)傳送的位置信號(hào)數(shù)據(jù),通過(guò)公式(1)
shippositon=(long)(-w*855/180) (1)






評(píng)論