基于混沌蟻群的神經(jīng)網(wǎng)絡(luò)速度辨識器研究

近年來,由于神經(jīng)網(wǎng)絡(luò)的研究取得了長足的進(jìn)展,基于BP神經(jīng)網(wǎng)絡(luò)模型的速度辨識方法得到了廣泛研究,但其仍存在收斂速度慢、易陷入局部極小值等問題,因此,對神經(jīng)網(wǎng)絡(luò)的優(yōu)化一直是當(dāng)前的研究熱點(diǎn)。本文將混沌引入到蟻群算法(Ant Colony Optimization,ACO)當(dāng)中,以形成混沌蟻群算法(Chaos Ant Colony Optimization,CACO),從而提高了對于BP神經(jīng)網(wǎng)絡(luò)的優(yōu)化效率和精度,解決了上述問題;同時,也在對異步電機(jī)直接轉(zhuǎn)矩控制(DTC)轉(zhuǎn)速辨識的仿真試驗(yàn)中,實(shí)現(xiàn)了對電機(jī)轉(zhuǎn)速的準(zhǔn)確辨識。
1 BP神經(jīng)網(wǎng)絡(luò)的缺點(diǎn)
BP神經(jīng)網(wǎng)絡(luò)是目前控制領(lǐng)域中應(yīng)用廣泛的一種神經(jīng)網(wǎng)絡(luò)模型,其學(xué)習(xí)過程由信息前向計(jì)算和誤差反向傳播過程組成。它采用梯度搜索技術(shù),可使網(wǎng)絡(luò)的實(shí)際輸出值與期望輸出值的誤差均方值最小化。此外,該網(wǎng)絡(luò)還具有良好的非線性映射和泛化能力。BP神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)如圖1所示。
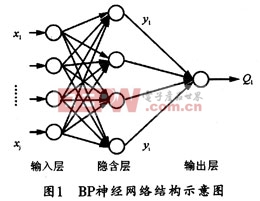
BP神經(jīng)網(wǎng)絡(luò)的數(shù)學(xué)模型為:
其中,xj為輸入層節(jié)點(diǎn)輸出,yi為隱含層節(jié)點(diǎn)輸出,O1為輸出層輸出。輸入層節(jié)點(diǎn)與隱含層節(jié)點(diǎn)間的網(wǎng)絡(luò)連接權(quán)值為ωij;隱含層節(jié)點(diǎn)與輸出層節(jié)點(diǎn)間的網(wǎng)絡(luò)連接權(quán)值為Tli;輸出層節(jié)點(diǎn)l的期望輸出為t1。f(net)為傳遞函數(shù)。為此,其網(wǎng)絡(luò)連接權(quán)值的調(diào)整公式如下:
其中,η為學(xué)習(xí)速率(η>0);k為訓(xùn)練次數(shù),α為平滑因子(0α1),為隱層節(jié)點(diǎn)誤差。
2 BP神經(jīng)網(wǎng)絡(luò)的混沌蟻群優(yōu)化過程
2.1基本蟻群算法
ACO的基本思路是:在算法的初始時刻,將一定數(shù)量的螞蟻隨機(jī)放在給定的N座城市上,并設(shè)此時各路徑上的信息素相等。螞蟻在運(yùn)動過程中根據(jù)各條路徑上的信息素量獨(dú)立選擇下一城市。螞蟻系統(tǒng)使用的轉(zhuǎn)移規(guī)則是根據(jù)螞蟻在兩個城市之間的轉(zhuǎn)移概率來進(jìn)行路徑選擇。在完成一次循環(huán)后,螞蟻在路徑上釋放一定量的信息素。完成一次循環(huán)所走過的路徑就是問題的一個解,當(dāng)所有螞蟻都完成循環(huán)后,即可得到最優(yōu)解。







評論