基于MSP430的自控式骨矯形器的設(shè)計(jì)與實(shí)現(xiàn)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
3 系統(tǒng)軟件設(shè)計(jì)
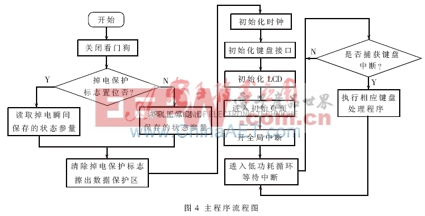
3.1主程序
為了減輕CPU的負(fù)擔(dān)和降低電路功耗, 系統(tǒng)全部功能都使用中斷方式實(shí)現(xiàn)。主程序進(jìn)行一些必要的初始化工作后進(jìn)入低功耗死循環(huán)狀態(tài)并等待中斷。一旦有中斷, CPU從低功耗模式中喚醒,進(jìn)行中斷處理, 中斷結(jié)束后再次返回低功耗死循環(huán)。主程序的流程圖如圖4所示。本文引用地址:http://www.104case.com/article/166532.htm
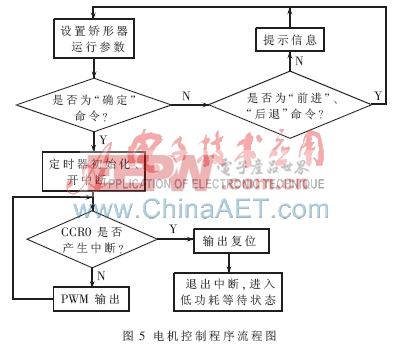
3.2 電機(jī)控制
矯形器的調(diào)速功能通過(guò)MSP430F169的定時(shí)器B輸出PWM方波來(lái)實(shí)現(xiàn)[5]。通過(guò)改變捕獲/比較寄存器CCR1、CCR2中的數(shù)值就可以改變定時(shí)器B產(chǎn)生的2路(P4.1、P4.2)PWM方波信號(hào)的占空比, 通過(guò)改變捕獲/比較寄存器CCR0中的數(shù)值就可改變PWM方波信號(hào)的周期,由此達(dá)到改變微電機(jī)轉(zhuǎn)速的目的。當(dāng)P4.1輸出PWM信號(hào)時(shí),矯形器正向運(yùn)行;當(dāng)P4.2輸出PWM信號(hào)時(shí),矯形器反向運(yùn)行;當(dāng)P4.1與P4.2都輸出或者都不輸出信號(hào)時(shí),矯形器停止運(yùn)行。
矯形器運(yùn)行位移通過(guò)定時(shí)器A所記錄的脈沖數(shù)來(lái)確定。微電機(jī)的轉(zhuǎn)速為8 000 r/m,經(jīng)過(guò)減速器4 096:1的減速,輸出速度為1.95 r/m,因此中心螺桿的轉(zhuǎn)速也為1.95 r/m,而中心螺桿的螺紋導(dǎo)程為0.5 mm。所以?xún)?nèi)套筒相對(duì)外套筒的運(yùn)行速度為0.975 mm/min,整個(gè)矯形器的運(yùn)行速度即為0.975 mm/min。通過(guò)運(yùn)算可知矯形器每運(yùn)行0.1 mm,微電機(jī)就運(yùn)行819.2轉(zhuǎn),而碼盤(pán)上固定了4個(gè)小磁鐵,計(jì)數(shù)器就記錄了3 277個(gè)脈沖。用戶(hù)通過(guò)鍵盤(pán)選擇當(dāng)次運(yùn)行位移,程序中通過(guò)設(shè)置CCR0值來(lái)實(shí)現(xiàn)對(duì)矯形器運(yùn)行位移的精確控制。電機(jī)控制程序流程圖如圖5所示。
本文介紹了一種新型高精度自控式骨矯形器設(shè)計(jì)及實(shí)現(xiàn)。該骨矯形器安放在長(zhǎng)骨骨髓腔內(nèi),以避免外固定器械的高并發(fā)癥,既可作內(nèi)固定器,又具有牽張作用,能夠在單次牽張后,達(dá)到長(zhǎng)時(shí)間持續(xù)穩(wěn)定的牽張效果;肢體牽張手術(shù)創(chuàng)傷小,手術(shù)操作及術(shù)后護(hù)理簡(jiǎn)單;性能安全可靠、操控簡(jiǎn)單穩(wěn)定實(shí)用而又不困擾患者日常生活,在實(shí)際應(yīng)用中效果明顯優(yōu)于傳統(tǒng)的骨矯形器,具有非常高的實(shí)用價(jià)值。
參考文獻(xiàn)
[1] 張濤,龐貴根.肢體延長(zhǎng)的研究進(jìn)展[J].中國(guó)骨與關(guān)節(jié)損傷雜志,2008,23(3):262-264.
[2] 趙輝三. 肢殘康復(fù)20年:假肢矯形器服務(wù)的發(fā)展與挑戰(zhàn)[J].中國(guó)矯形外科雜志,2007,15(7):481-483.
[3] 魏小龍.MSP430系列單片機(jī)接口技術(shù)及系統(tǒng)設(shè)計(jì)實(shí)例[M].北京:北京航空航天大學(xué)出版社,2002.
[4] 莊偉,宋光明,魏志剛,等.具有機(jī)動(dòng)能力的無(wú)線(xiàn)傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的設(shè)計(jì)與實(shí)現(xiàn)[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),
2007,37(4):939-943.















評(píng)論