單片機解碼萬能紅外遙控器C51程序

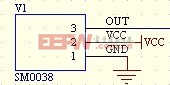
使用方法:打開串口調試助手,設置為9600 bps 單片機這邊用11.0592MHz的晶振,使用sm0038或者其他型號的紅外接收頭按下面的電路連接好,其中out直接與單片機的p3.2腳相連.按下遙控器,串口調試助手便會出現解碼值.
/******************************************************************/
/* 本程序的藍本從網上搜集,經修改并注釋,萬能遙控器解碼成功 */
/* 晶振:11.0592MHz */
/* 整理與測試:單片機教程網 http://www.51hei.com 胡琴 2012.5.15 */
/************************* 說 明 *********************************/
/* 以一個9ms的低電平和4.5ms的高電平為引導碼,后跟32位二進制代碼 */
/* 前16位為8位用戶碼及其反碼,后16位為8位的操作碼及其反碼 */
/* 以脈寬為0.565ms、間隔0.56ms、周期為1.125ms的組合表示0; */
/* 以脈寬為0.565ms、間隔1.685ms、周期為2.25ms的組合表示1。 */
/* 注意:接收碼的脈寬與間隔是對發射碼取反的,即間隔是0.565ms */
/* 解碼后共有四個十六進制碼,本程序取第三個作為識別碼 */
/*******************************************************************/
#include
#define uchar unsigned char
uchar data IRcode[4]; //定義一個4字節的數組用來存儲代碼
uchar CodeTemp; //編碼字節緩存變量
uchar i,j,k; //延時用的循環變量
sbit IRsignal=P3^2; //HS0038接收頭OUT端直接連P3.2(INT0)
sbit P0_0=P0^0; //P0連接到 LED 上
sbit P0_1=P0^1;
sbit P0_2=P0^2;
/**************************延時0.9ms子程序**********************/
void Delay0_9ms(void)
{
uchar j,k;
for(j=18;j>0;j--)
for(k=20;k>0;k--)
;
}
/***************************延時1ms子程序**********************/
void Delay1ms(void)
{
uchar i,j;
for(i=2;i>0;i--)
for(j=230;j>0;j--)
;
}
/***************************延時4.5ms子程序**********************/
void Delay4_5ms(void)
{
uchar i,j;
for(i=10;i>0;i--)
for(j=225;j>0;j--)
;
}
/**************************** 延時子程序 ************************/
void Delay(void)
{
uchar i,j,k;
for(i=200;i>0;i--)
for(j=200;j>0;j--)
for(k=3;k>0;k--)
;
}
/******************** 中斷0解碼服務子程序 ********************/
void int0(void) interrupt 0 using 2
{
EA = 0; //??? 可以這樣,跳入中斷,但仍可對P3.2(INT0)進行電平變化的讀取
for(k=0;k10;k++)
{
Delay0_9ms();
if (IRsignal==1) //如果0.9ms后IRsignal=1,說明不是引導碼
{
k=10;
break;
}
else if(k==9) //如果 持續了10×0.9ms=9ms的低電平,說明是引導碼
{
while(IRsignal==0);
Delay4_5ms(); //跳過持續4.5ms的高電平
for(i=0;i4;i++) //分別讀取4個字節
{
for(j=1;j=8;j++) //每個字節8個bit的判斷
{
while(IRsignal==0); //等待上升沿 此處用得很好:因為0.56ms的低電平(接收時)是代碼0與1的相同部分
Delay0_9ms(); //從上升沿那一時刻開始延時0.9ms(因為0.9介于0.56(=1.125-0.56)與1.69(=2.25-0.56)之間),再判斷IRsignal
if(IRsignal==1) //如果IRsignal是1,高位置1,并向右移一位
{
Delay1ms(); //為什么要延時1ms呢?因為要使IRsignal跳至低電平(即0.56ms的0與1相同部分上)
CodeTemp=CodeTemp|0x80; //此處的算法很好
if(j8) CodeTemp=CodeTemp>>1;
}
else
if(j8)
CodeTemp=CodeTemp>>1;//如果IRsignal是0,則直接向右移一位,自動補0
}
IRcode=CodeTemp;
CodeTemp=0;
}
for(i=0;i4;i++) //通過串口將代碼發出
{
SBUF=IRcode;
while(!TI); //等待一個字節發送完畢
TI=0;
}
Delay();
}
}
EA = 1;
}
/***********************串口初始化程序*********************/
void initUart(void)
{
TMOD |= 0x20; //
SCON = 0x50; //
PCON |= 0x80; //
TH1 = 250; // 9600 bps @ 11.0592MHz
TL1 = 250;
TR1 = 1;
}
/**************************主程序*************************/
void main()
{
P0=0XFF;
initUart();
IT0 = 1; //INT0為負邊沿觸發, (1:負邊沿觸發,0:低電平觸發)
EX0 = 1; //外部中斷INT0開, (1:開, 0:關 )
EA = 1; //開所有中斷
CodeTemp = 0; //初始化紅外編碼字節緩存變量
Delay();
while(1)
{
switch(IRcode[2])
{
case 0x42:P0=0XFF;P0_0=0;break;
case 0x4e:P0=0XFF;P0_1=0;break;
case 0x52:P0=0XFF;P0_2=0;break;
}
}
}
晶振相關文章:晶振原理









評論